
科研動(dòng)態(tài)
一類(lèi)非線(xiàn)性離散系統(tǒng)基于非線(xiàn)性濾波器的魯棒自適應(yīng)控制方法
中文題目:一類(lèi)非線(xiàn)性離散系統(tǒng)基于非線(xiàn)性濾波器的魯棒自適應(yīng)控制方法
論文題目:A novel nonlinear filter-based robust adaptive control method for a class of nonlinear discrete-time systems
錄用期刊/會(huì)議:processes (JCR Q2)
原文DOI:https://doi.org/10.3390/pr12010171
原文鏈接:https://www.mdpi.com/2227-9717/12/1/171
錄用/見(jiàn)刊時(shí)間:2024.1.11
作者列表:
1)趙澤一 中國(guó)石油大學(xué)(北京)信息科學(xué)與工程學(xué)院/人工智能學(xué)院 計(jì)算機(jī)科學(xué)與技術(shù) 本21
2)王 珠 中國(guó)石油大學(xué)(北京)信息科學(xué)與工程學(xué)院/人工智能學(xué)院 自動(dòng)化系教師
3)王 倩 中國(guó)石油大學(xué)(北京)信息科學(xué)與工程學(xué)院/人工智能學(xué)院 控制科學(xué)與工程 碩21
摘要:
本文介紹了一種利用非線(xiàn)性濾波器的創(chuàng)新自適應(yīng)控制方法對(duì)于非線(xiàn)性離散時(shí)間系統(tǒng)的特定子集,考慮輸入和輸出噪聲。該系統(tǒng)可以轉(zhuǎn)換為非線(xiàn)性自回歸移動(dòng)平均外源輸入(NARMAX)模型。將離散Nussbaum增益的概念引入解決與未知前饋或控制方向相關(guān)的理論約束增益,并且引入了擴(kuò)展的自適應(yīng)調(diào)諧序列以促進(jìn)參數(shù)更新。在無(wú)噪聲的情況下,漸近輸出跟蹤和全局穩(wěn)定性是通過(guò)自適應(yīng)控制實(shí)現(xiàn)。此外,在存在輸入噪聲和輸出噪聲的情況下設(shè)計(jì)了一種新穎的非線(xiàn)性濾波器來(lái)產(chǎn)生更準(zhǔn)確的濾波輸出,這提高了控制系統(tǒng)準(zhǔn)確適應(yīng)和跟蹤的能力。最后,提供了示例來(lái)展示方法的有效性和準(zhǔn)確性。
背景與動(dòng)機(jī):
近年來(lái),人們對(duì)連續(xù)非線(xiàn)性系統(tǒng)的自適應(yīng)控制進(jìn)行了大量的研究。許多工業(yè)過(guò)程表現(xiàn)出非線(xiàn)性行為,并且已經(jīng)開(kāi)發(fā)了各種用于識(shí)別非線(xiàn)性系統(tǒng)的方法,這些方法可以應(yīng)用于輸入非線(xiàn)性系統(tǒng),輸出非線(xiàn)性系統(tǒng)以及輸入和輸出非線(xiàn)性的系統(tǒng)。這一努力需要對(duì)后退設(shè)計(jì)方法進(jìn)行深入的研究,擴(kuò)大其范圍以滿(mǎn)足非線(xiàn)性連續(xù)時(shí)間系統(tǒng)的需要。這種系統(tǒng)可以有效地轉(zhuǎn)換為輸出反饋形式或參數(shù)嚴(yán)格反饋形式。這些調(diào)查的結(jié)果也被擴(kuò)展到包含連續(xù)多輸入多輸出(MIMO)系統(tǒng)的領(lǐng)域。盡管在理解連續(xù)系統(tǒng)中的自適應(yīng)控制方面取得了相當(dāng)大的進(jìn)步,但值得注意的是,這些發(fā)現(xiàn)的離散對(duì)應(yīng)物還沒(méi)有得到相應(yīng)的探索。
設(shè)計(jì)與實(shí)現(xiàn):
1、無(wú)干擾自適應(yīng)控制設(shè)計(jì)
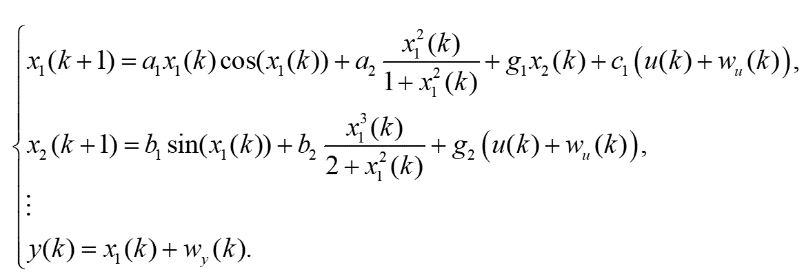
考慮如下輸入前饋輸出反饋形式的非線(xiàn)性SISO離散時(shí)間系統(tǒng):
 (1)
(1)
其中,
 (2)
(2)
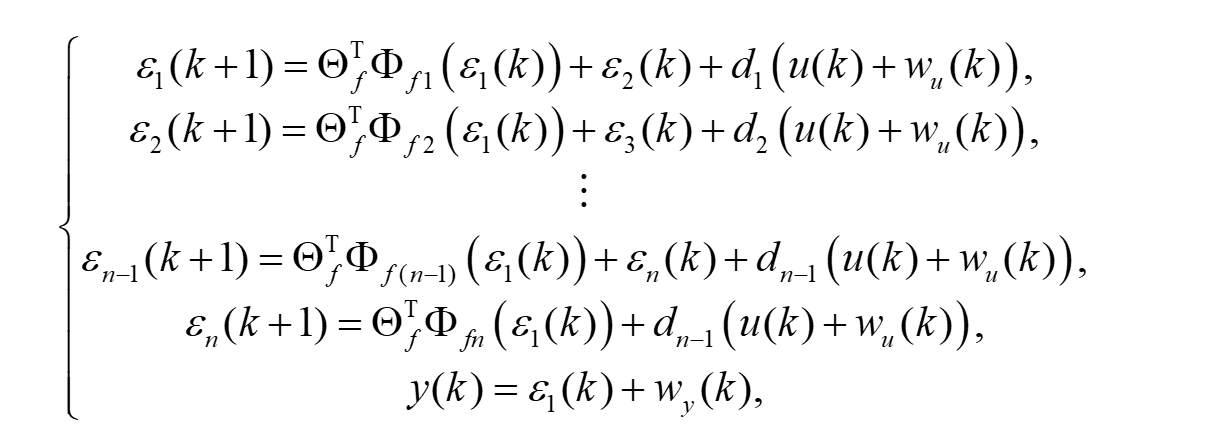
在無(wú)噪聲情況下,即 ,考慮自適應(yīng)控制方案。在不存在輸入噪聲和輸出噪聲的情況下,將式(2)中的所有方程迭代代入合并,可以得到如下系統(tǒng)方程:
,考慮自適應(yīng)控制方案。在不存在輸入噪聲和輸出噪聲的情況下,將式(2)中的所有方程迭代代入合并,可以得到如下系統(tǒng)方程:
 (3)
(3)
產(chǎn)生的殘差可以用下式表示,
 (4)
(4)
在式(4)中,存在未知的前饋增益d1,使得在不知道d1的情況下遞歸參數(shù)估計(jì)具有挑戰(zhàn)性,并且確定參數(shù)估計(jì)的更新方向是一個(gè)挑戰(zhàn)。
因此,為了解決這一限制,引入了離散Nussbaum增益。離散Nussbaum增益N(p(k))可以表示為
 (5)
(5)
通過(guò)將離散Nussbaum增益引入?yún)?shù)估計(jì),我們得到如下更新規(guī)律:
 (6)
(6)
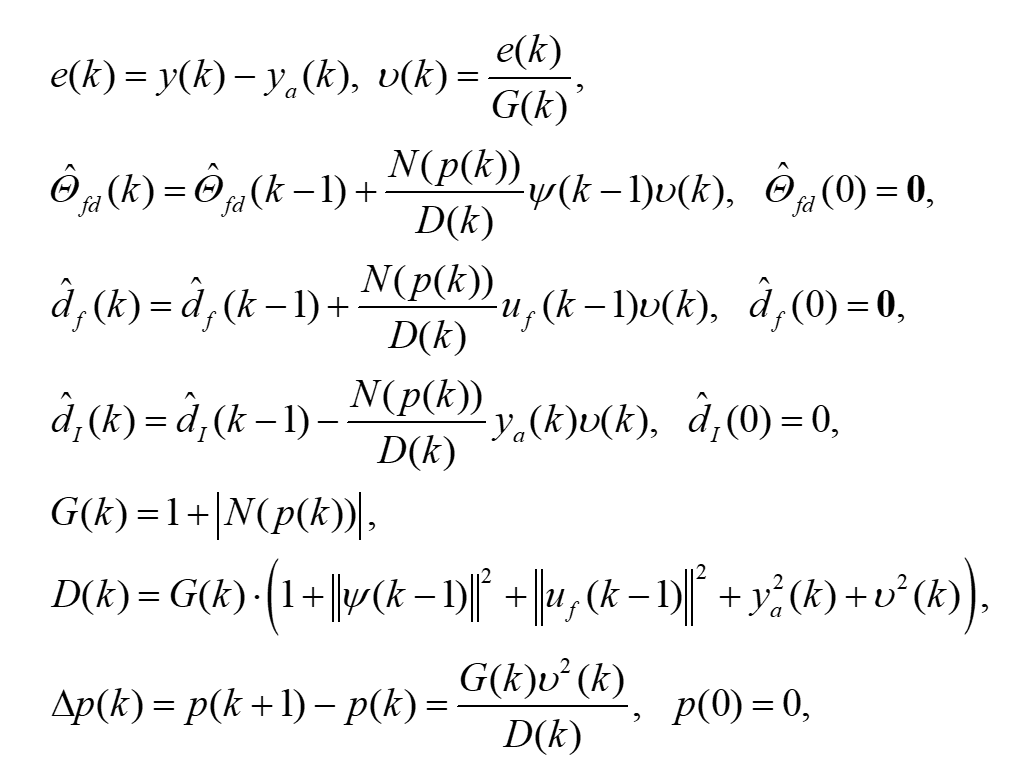
其中u(k)為增廣誤差,D(k)為歸一化序列。根據(jù)p(k),確定
因此,序列p(k)很好滿(mǎn)足。
為了加快參數(shù)更新過(guò)程,采用了一個(gè)修正的自適應(yīng)調(diào)諧因子來(lái)更新律。基于非遞減非負(fù)序列p(k),可將調(diào)諧因子描述為
![]() (7)
(7)
通過(guò)引入擴(kuò)展自適應(yīng)調(diào)諧因子,可以將式(6)中的參數(shù)更新過(guò)程修改為:
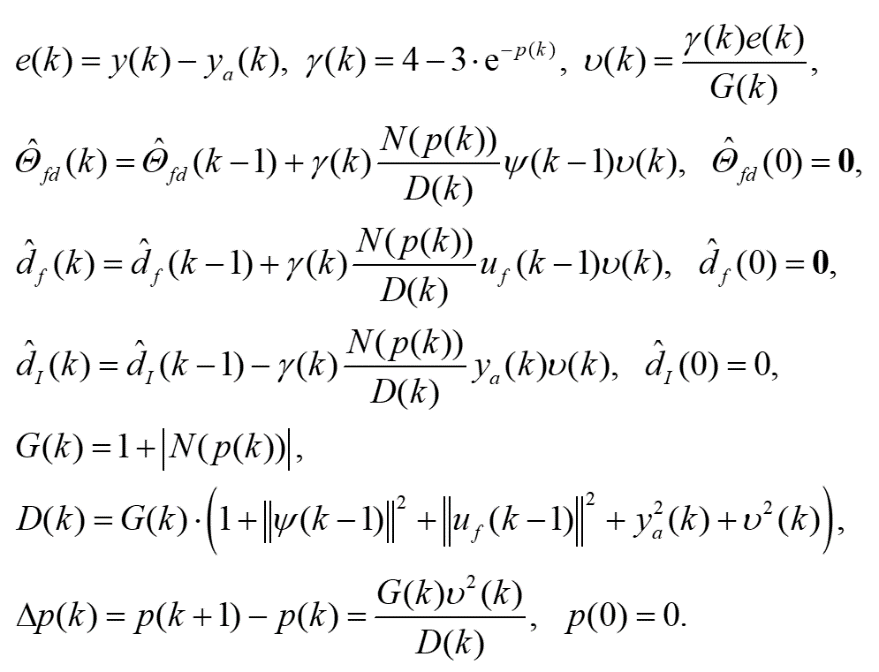 (8)
(8)
2、 一種基于非線(xiàn)性濾波的擾動(dòng)自適應(yīng)控制方法
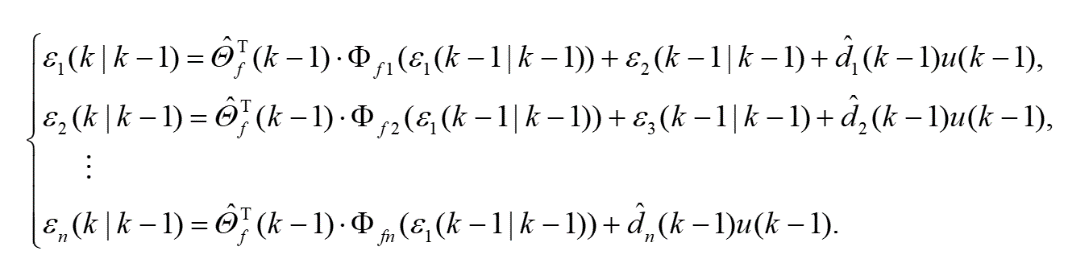
針對(duì)存在輸入噪聲和輸出噪聲的非線(xiàn)性離散系統(tǒng),提出了一種新穎的非線(xiàn)性濾波器,即
通過(guò)這種非線(xiàn)性濾波器,可以得到更精確的濾波輸出。基于卡爾曼濾波方程理論,研究了非線(xiàn)性系統(tǒng)狀態(tài)估計(jì)的有效估計(jì)技術(shù)。根據(jù)卡爾曼濾波器,時(shí)間更新和測(cè)量更新方程也可以推廣到非線(xiàn)性濾波器中,在存在噪聲的情況下作為狀態(tài)觀(guān)測(cè)器,設(shè)計(jì)了一個(gè)非線(xiàn)性濾波器。
非線(xiàn)性濾波器的時(shí)間更新方程為:
 (9)
(9)
 (10)
(10)
非線(xiàn)性濾波器的測(cè)量更新方程為:
 (11)
(11)
 (12)
(12)
 (13)
(13)
根據(jù)參考文獻(xiàn)中自適應(yīng)因子的設(shè)計(jì),α項(xiàng)可取為
 (14)
(14)
為了獲得更精確的濾波輸出,期望能夠跟蹤參考軌跡,將非線(xiàn)性濾波器的輸出設(shè)置為第一濾波子系統(tǒng)狀態(tài)。在歷元k處的濾波輸出描述為
![]() (15)
(15)
為了發(fā)展濾波輸出的自適應(yīng)控制,我們定義
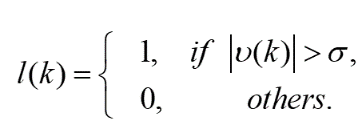
![]()
必須修改遞歸參數(shù)更新律(6)。使用參考文獻(xiàn)中的死區(qū)方法,使用項(xiàng)l(k)來(lái)設(shè)置更新過(guò)程的閾值。因此,利用濾波后的輸出,參數(shù)更新規(guī)律如下:
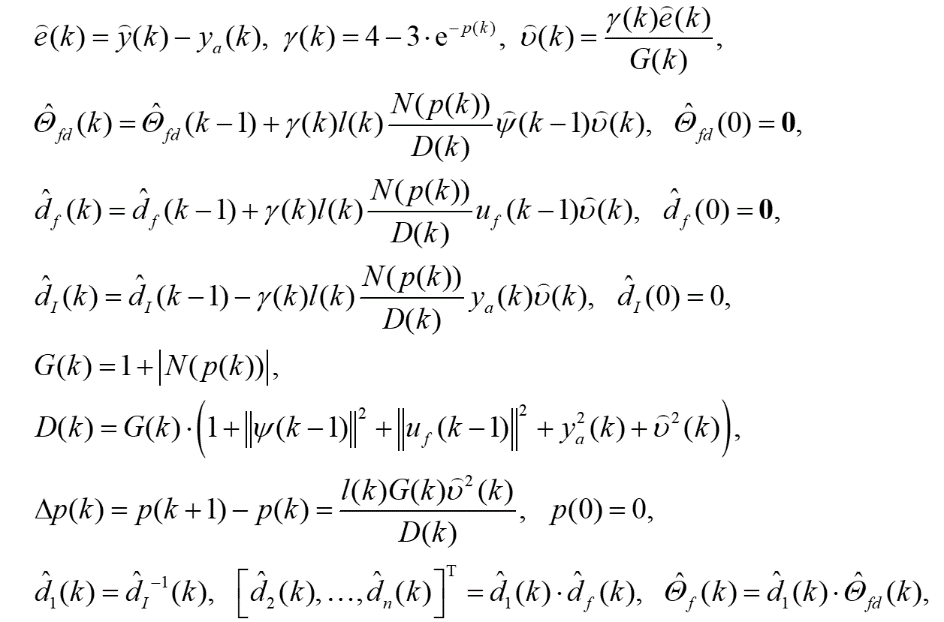 (16)
(16)
利用式(9)-(14)中的非線(xiàn)性濾波算法,并應(yīng)用具有參數(shù)更新律的自適應(yīng)控制,給出了一種完整的基于非線(xiàn)性濾波的魯棒自適應(yīng)控制方法。
實(shí)驗(yàn)結(jié)果及分析:
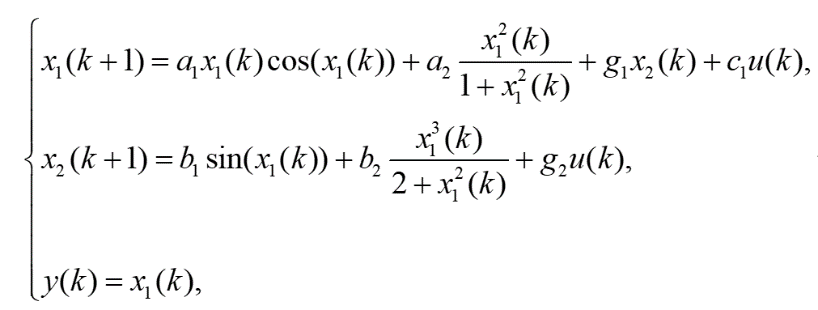
例1:考慮以下無(wú)噪聲二階離散非線(xiàn)性系統(tǒng)
采用具有遞歸參數(shù)更新律的一般自適應(yīng)控制,進(jìn)行了兩次仿真,證明控制系統(tǒng)的自適應(yīng)性不受與第一子系統(tǒng)狀態(tài)相關(guān)的前饋增益方向c1變化的影響。因此,第一次假定c1項(xiàng)為負(fù)值。然后,在模擬系統(tǒng)的第二次運(yùn)行中假設(shè)為正c1。結(jié)果如圖1-3所示。圖1不僅顯示了輸出和參考的比較,還顯示了跟蹤誤差和基準(zhǔn)0的比較。很明顯,無(wú)論是負(fù)增益還是正增益c1,自適應(yīng)方法在無(wú)噪聲情況下都是有效的。控件輸入的有界性如圖2所示。最后,離散Nussbaum增益N(x(k))如圖3所示。很容易看出,離散努斯鮑姆增益在兩個(gè)方向上搜索以檢測(cè)參數(shù)更新方向。
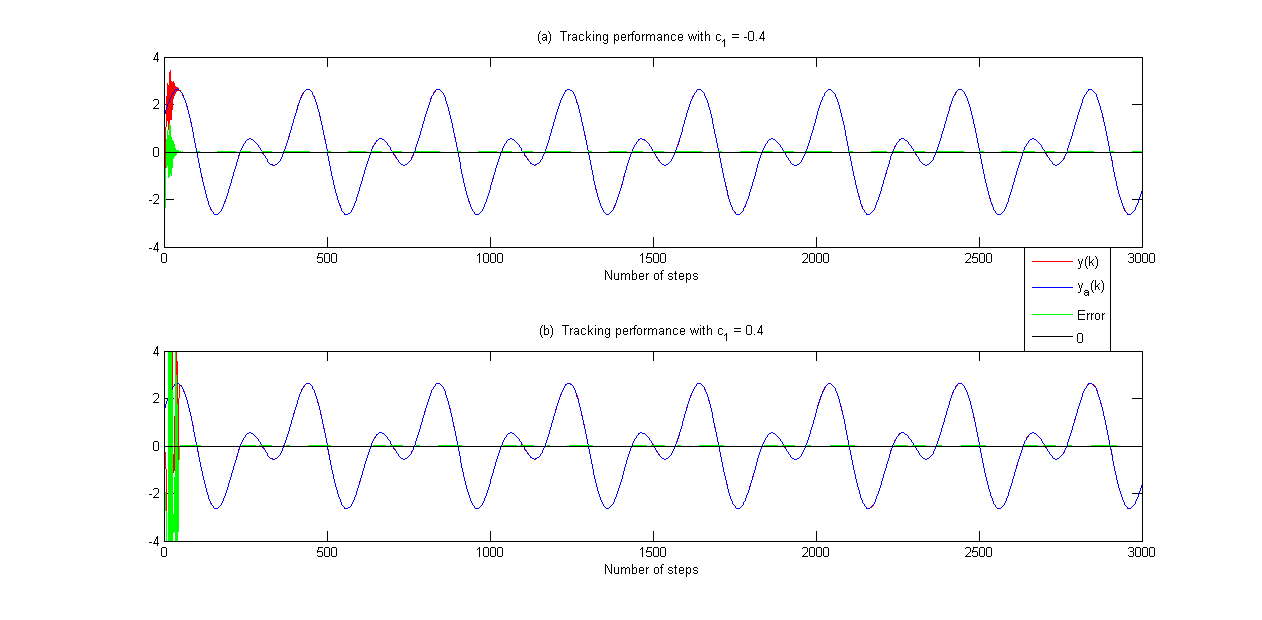
圖1 例1的追蹤表現(xiàn)比較
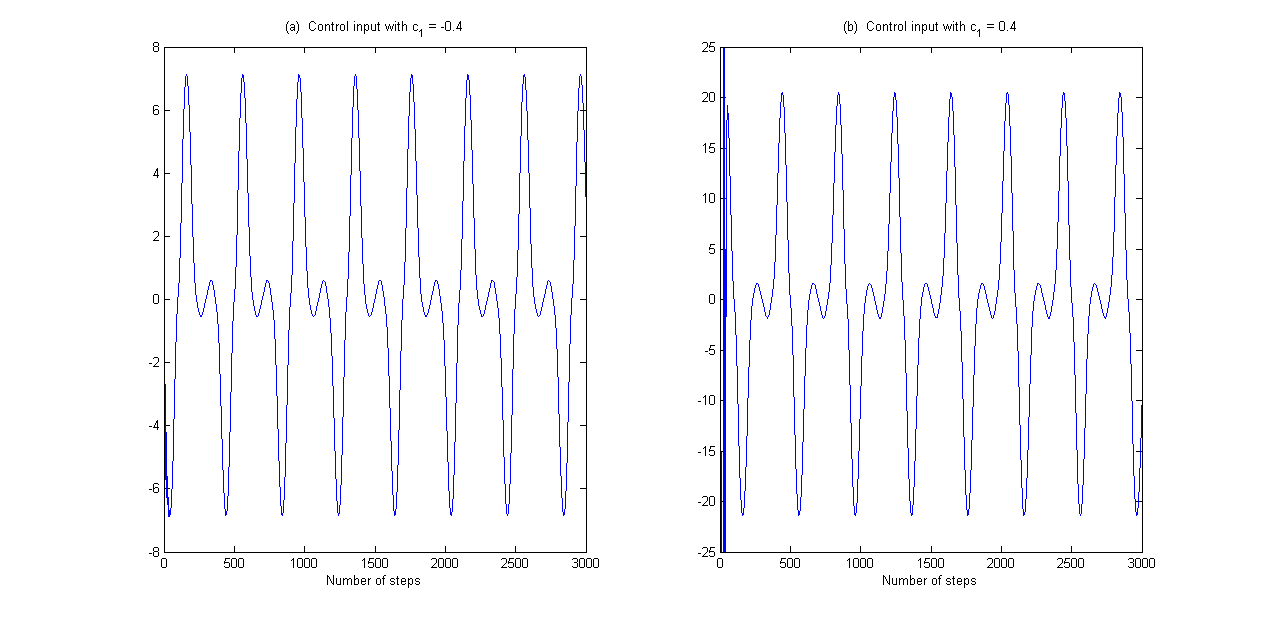
圖2 例1的輸入控制
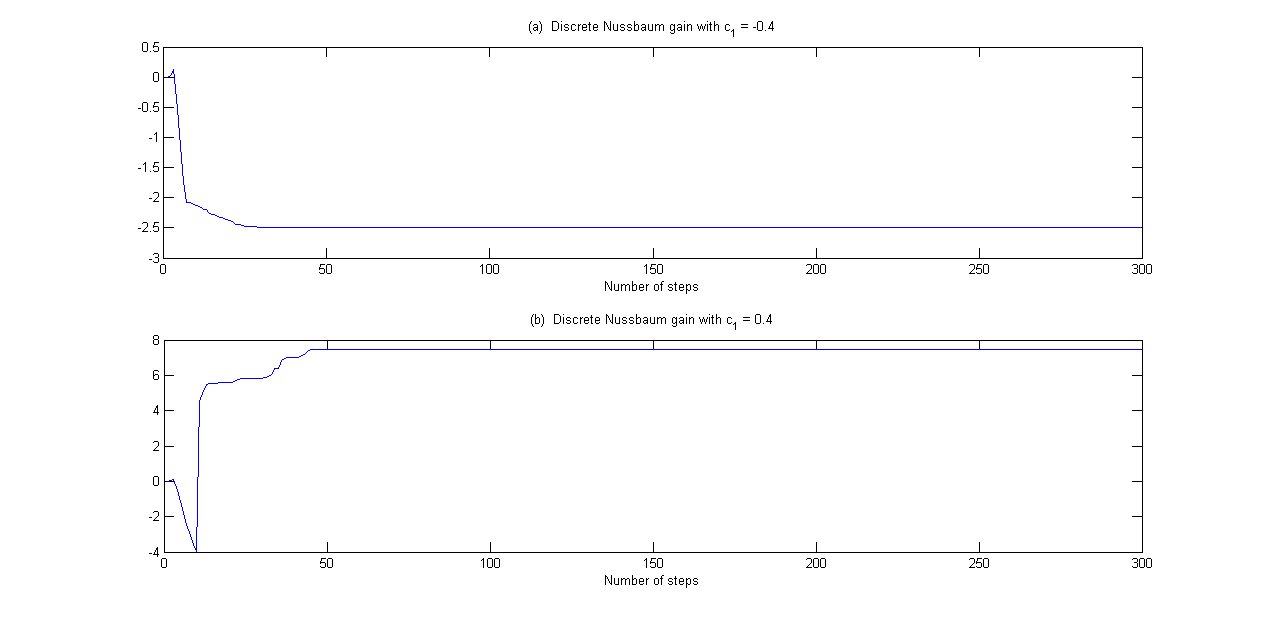
圖3 例1中的Nussbaum 增益N(x(k))
例2:在存在輸入噪聲和輸出噪聲的情況下,考慮一個(gè)類(lèi)似的離散非線(xiàn)性系統(tǒng):
輸入和輸出噪聲滿(mǎn)足,
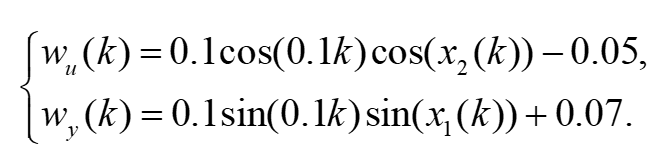
初始狀態(tài)和期望的參考軌跡與例1中相同。采用式(9)-式(14)中的非線(xiàn)性濾波方法,并采用遞歸參數(shù)更新律和自適應(yīng)控制,可以得到濾波后輸出的跟蹤性能。需要注意的是,擴(kuò)展的自適應(yīng)調(diào)諧序列和閾值分別取
此外,還將所提出的非線(xiàn)性濾波器的結(jié)果與使用通用自適應(yīng)方法提供的結(jié)果進(jìn)行了比較。比較結(jié)果如圖4-6所示。圖 4 顯示了跟蹤性能的比較。輸入有界性和離散Nussbaum增益分別如圖5和圖6所示。
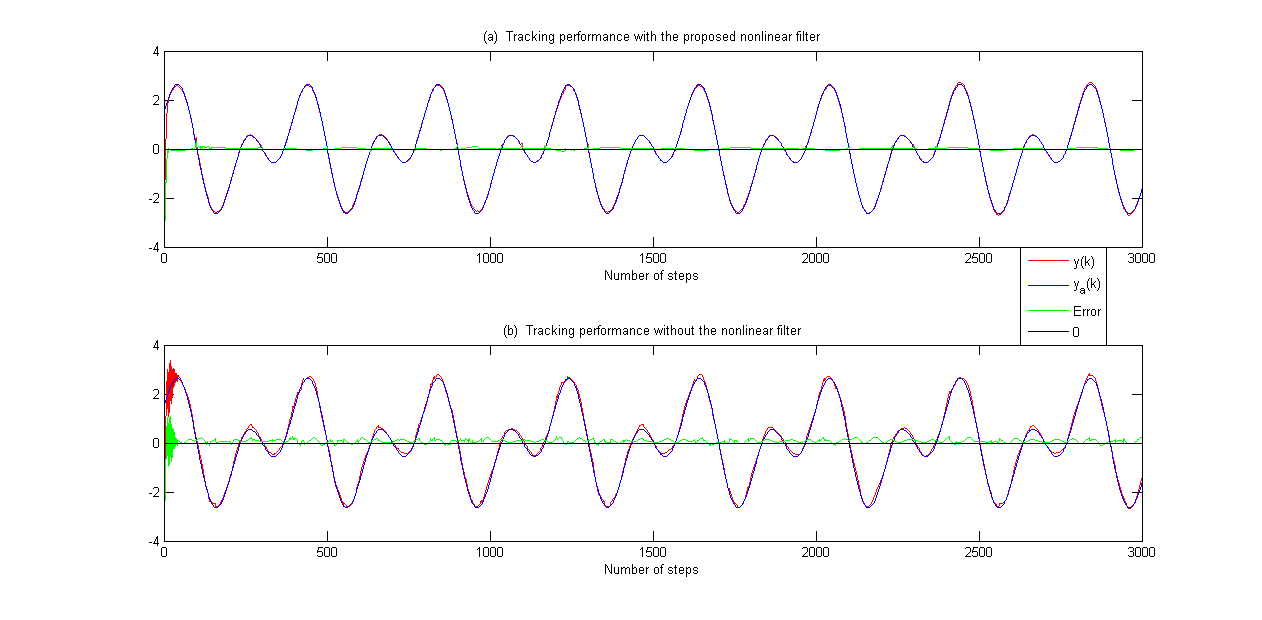
圖4 例2的追蹤表現(xiàn)比較
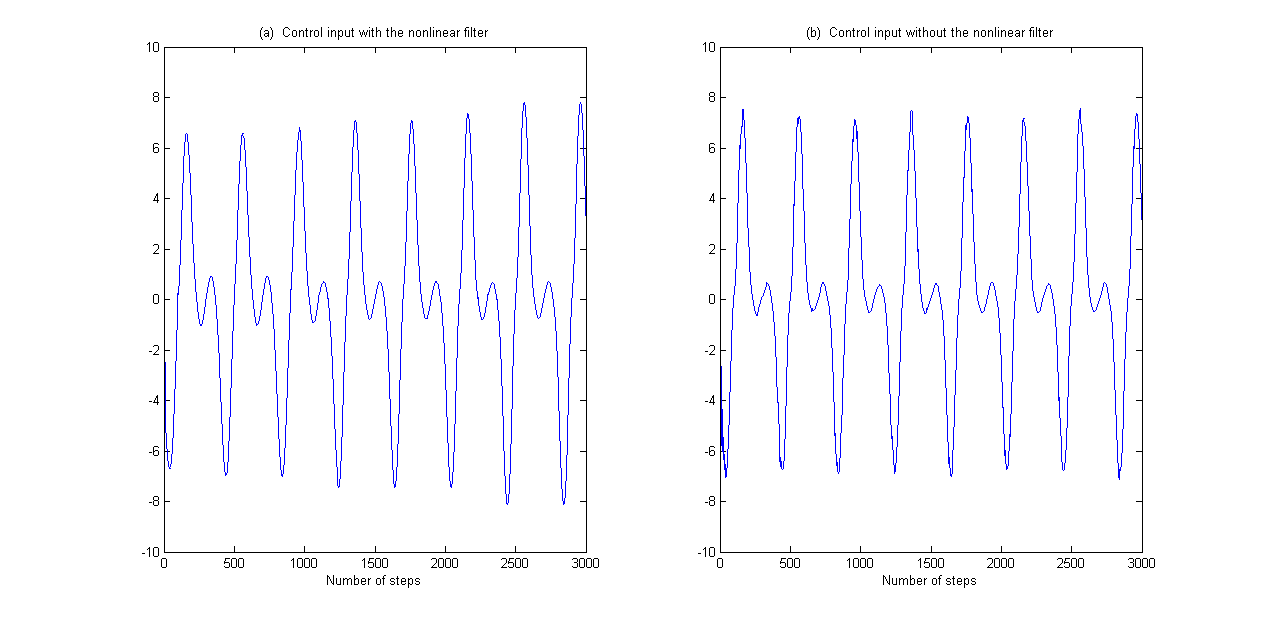
圖5 例2的輸入控制
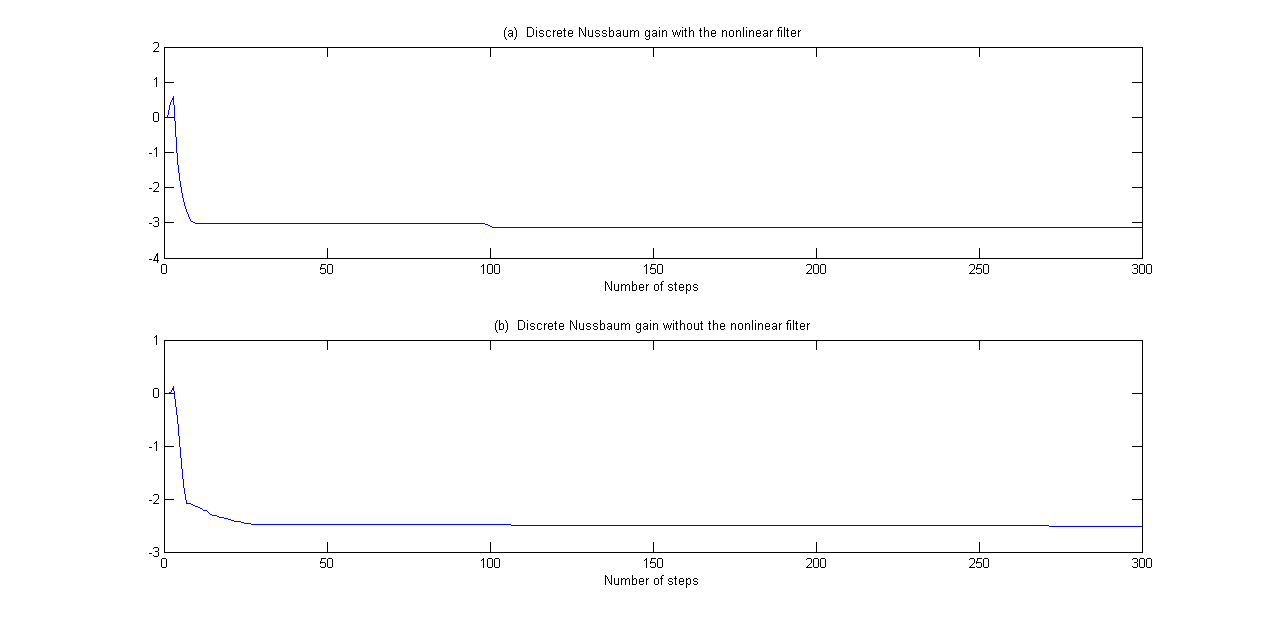
圖6 例2中的Nussbaum 增益N(x(k))
例3:考慮正項(xiàng)c1=0.4的情況。在與例2相同的輸入噪聲和輸出噪聲存在的情況下,仿真模型和所有其他系統(tǒng)參數(shù)也與例2相同。初始狀態(tài)和期望的參考軌跡與例1相同。通過(guò)使用非線(xiàn)性濾波器和相應(yīng)的自適應(yīng)控制方案,可以得到濾波后輸出的跟蹤性能;閾值設(shè)為
與例2類(lèi)似,不同自適應(yīng)控制方案的對(duì)比結(jié)果如圖7-9所示。跟蹤性能的比較如圖7所示。
此外,圖8說(shuō)明了輸入有界性的結(jié)果。圖9描述了離散Nussbaum增益的比較。從例2、例3和圖4-9中,我們可以得出以下結(jié)論:
1.無(wú)論c1 > 0還是c1 < 0,基于非線(xiàn)性濾波器的自適應(yīng)控制方法都能比一般自適應(yīng)控制方案更準(zhǔn)確地顯示跟蹤性能;
2. 為了跟蹤參考軌跡,采用基于非線(xiàn)性濾波器的自適應(yīng)控制方法實(shí)現(xiàn)了小超調(diào)量和短沉降時(shí)間;
3. 在所有比較示例中,控制輸入都是有界的;
4. 所提出的識(shí)別算法采用離散Nussbaum增益,可以設(shè)計(jì)成在兩個(gè)方向內(nèi)檢測(cè)模型參數(shù)的方向。
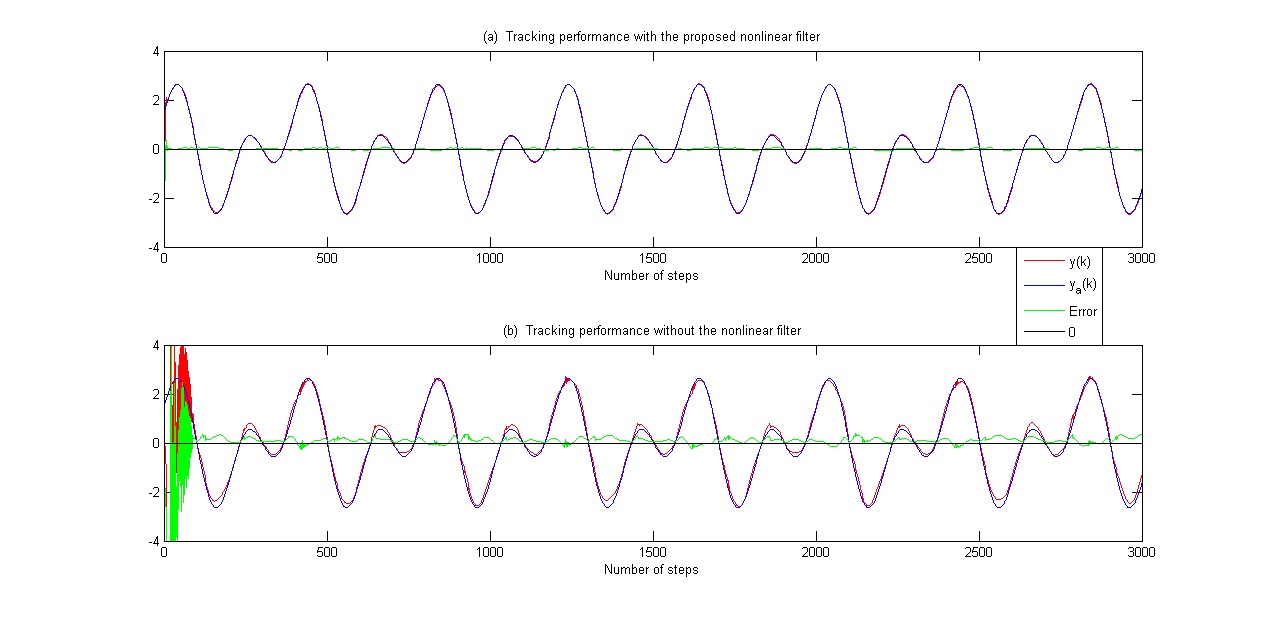
圖7 例3的追蹤表現(xiàn)比較
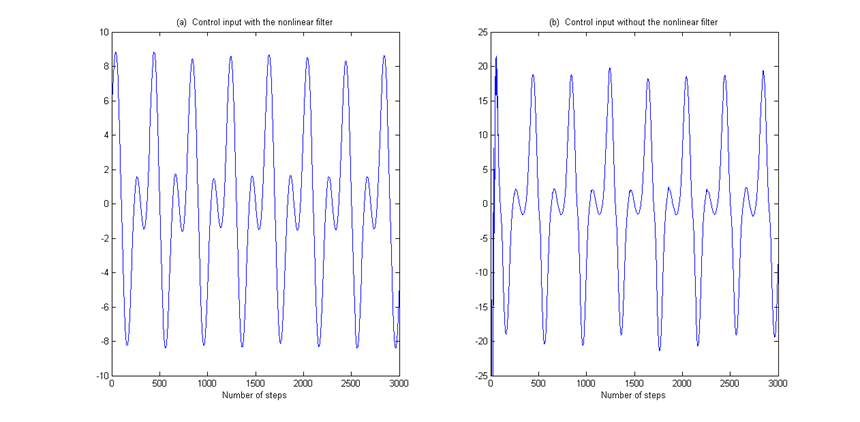
圖8 例3的輸入控制
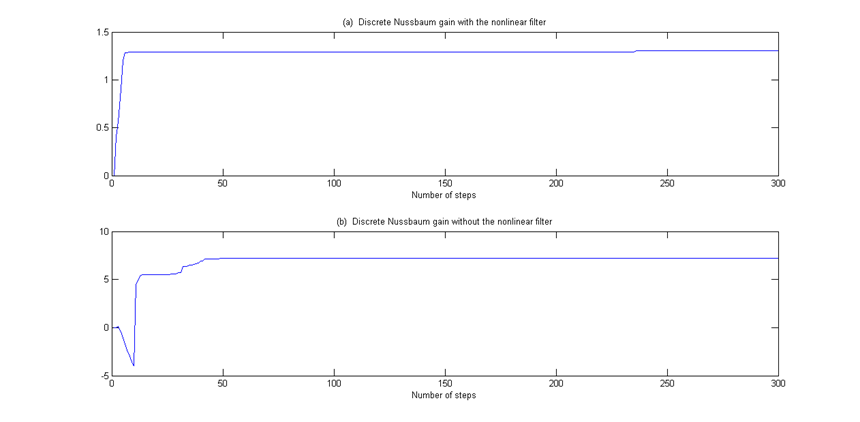
圖9 例3中的Nussbaum 增益N(x(k))
結(jié)論:
本文提出了一種新的基于非線(xiàn)性濾波器的自適應(yīng)控制方法,并將其引入到一類(lèi)具有輸入和輸出噪聲的非線(xiàn)性離散系統(tǒng)中。該方法結(jié)合了輸入前饋和輸出反饋。為了解決確定參數(shù)估計(jì)更新方向的問(wèn)題,利用離散努斯鮑姆增益,以及擴(kuò)展的自適應(yīng)調(diào)諧序列來(lái)加快更新的過(guò)程。該方法同樣適用于無(wú)噪聲系統(tǒng),并證明了無(wú)噪聲系統(tǒng)的收斂性。在存在輸入和輸出噪聲干擾的情況下,受卡爾曼濾波方程的啟發(fā),將時(shí)間更新和測(cè)量更新方程推廣到非線(xiàn)性濾波器中,并證明了算法的收斂性。與一般不加濾波的自適應(yīng)控制方法相比,該方法在識(shí)別過(guò)程中隨參數(shù)模型的變化呈現(xiàn)自適應(yīng)的控制率變化。它提供了更好的參數(shù)軌跡跟蹤和實(shí)時(shí)性。相比之下,傳統(tǒng)的辨識(shí)方法保持固定的控制率,不隨估計(jì)參數(shù)的變化而變化。基于非線(xiàn)性濾波器的自適應(yīng)控制提供了更精確的濾波輸出和更好的參考軌跡跟蹤。仿真結(jié)果驗(yàn)證了理論結(jié)果。該方法可應(yīng)用于工程實(shí)踐,實(shí)現(xiàn)對(duì)此類(lèi)非線(xiàn)性系統(tǒng)的魯棒自適應(yīng)控制。
通訊作者簡(jiǎn)介:
王珠,男,博士,中共黨員,現(xiàn)任中國(guó)石油大學(xué)(北京)副教授、碩士生導(dǎo)師。2016年至今在中國(guó)石油大學(xué)(北京)自動(dòng)化系工作,現(xiàn)任北京人工智能學(xué)會(huì)理事、中國(guó)化工學(xué)會(huì)信息技術(shù)應(yīng)用專(zhuān)業(yè)委員會(huì)青年委員。長(zhǎng)期從事系統(tǒng)辨識(shí)與智能控制、石化過(guò)程故障預(yù)警、工藝優(yōu)化以及基于深度學(xué)習(xí)的時(shí)間序列預(yù)測(cè)等方面的研究工作,以第一作者或通訊作者身份發(fā)表高水平學(xué)術(shù)論文20余篇。主持國(guó)家自然科學(xué)基金項(xiàng)目及多個(gè)重點(diǎn)企業(yè)橫向項(xiàng)目。