
海洋立管反沖的魯棒方差控制
中文題目:海洋立管反沖的魯棒方差控制
錄用期刊/會議:CPCC 2024(CAA-A類)
作者列表:
1) 孫世龍 中國石油大學(xué)(北京)人工智能學(xué)院 碩22級
2)譚文濤 中國石油大學(xué)(北京)人工智能學(xué)院 碩22級
3)岳元龍 中國石油大學(xué)(北京)人工智能學(xué)院 自動化系教師
摘要:
本文提出了一種魯棒方差控制器,用于應(yīng)對深水鉆井隔水立管系統(tǒng)在緊急情況下,由于立管下部與防噴器組緊急解脫所產(chǎn)生的立管反沖現(xiàn)象。針對建模過程中由于參數(shù)誤差和張緊器安裝傾角變化引起的不可避免的模型不確定性,本文構(gòu)建了增量式立管反沖狀態(tài)空間模型,并通過極點(diǎn)配置和方差約束的控制方法實(shí)現(xiàn)了閉環(huán)系統(tǒng)的動態(tài)和穩(wěn)態(tài)性能控制。仿真結(jié)果表明,該控制器能夠有效抑制立管反沖現(xiàn)象,改善系統(tǒng)的動態(tài)和穩(wěn)態(tài)響應(yīng),減少滑動接頭和立管組件的損壞風(fēng)險。
背景與動機(jī):
深水鉆井隔水立管系統(tǒng)連接著鉆井平臺與海底設(shè)備,在極端海況或設(shè)備故障等情況下,立管需要緊急脫離防噴器組。此時立管的彈性勢能迅速釋放,引發(fā)立管反沖,若不加以有效控制,可能導(dǎo)致嚴(yán)重的安全事故。立管反沖控制問題在國內(nèi)外受到了廣泛關(guān)注,但現(xiàn)有研究大多基于連續(xù)時間模型,且未充分考慮參數(shù)不確定性對立管反沖控制的影響。因此,為解決現(xiàn)有問題,本文提出了一種離散魯棒控制方法,以提高系統(tǒng)的穩(wěn)定性與魯棒性。
設(shè)計與實(shí)現(xiàn):
首先,在質(zhì)量塊-彈簧-阻尼模型種種考慮張緊器安裝傾角變化和參數(shù)誤差引起的模型不確定性,并建立了增量式立管反沖的狀態(tài)空間模型。
![]()
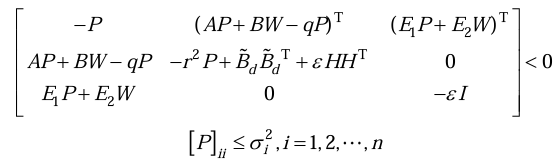
隨后,使用極點(diǎn)配置技術(shù)將閉環(huán)系統(tǒng)的極點(diǎn)約束在復(fù)平面的指定區(qū)域D(q,r)內(nèi),以獲得理想的動態(tài)響應(yīng)。同時,基于方差約束理論,通過求解線性矩陣不等式(LMI)獲得閉環(huán)系統(tǒng)的狀態(tài)反饋增益,從而實(shí)現(xiàn)穩(wěn)態(tài)方差的約束,確保系統(tǒng)的穩(wěn)態(tài)性能符合要求。所設(shè)計的LMI如下所示
![]()
若想獲得控制力最小的控制律,即最小化J(U),設(shè)計LMI求解獲得最小能量魯棒方差控制器
![]()
所設(shè)計的LMI如下所示
實(shí)驗(yàn)結(jié)果及分析:
為了驗(yàn)證所提出方法的有效性,本文基于中國南海某鉆臺平臺的實(shí)際工程數(shù)據(jù)進(jìn)行仿真分析。實(shí)驗(yàn)比較了魯棒方差控制器(RVC)與離散LQR控制器及DRHGPC控制器在不同海況下的性能。結(jié)果顯示,在正常和極端海況下,RVC能夠更加快速地抑制立管反沖的位移,無明顯超調(diào)現(xiàn)象,并且在穩(wěn)態(tài)時的振幅更小。相比其他方法,RVC在動態(tài)和穩(wěn)態(tài)性能方面展現(xiàn)了更優(yōu)異的表現(xiàn),同時能量消耗較少。此外,RVC在處理系統(tǒng)不確定性方面具有顯著的魯棒性,在不確定性達(dá)到10%或20%時,仍能維持較好的動態(tài)和穩(wěn)態(tài)響應(yīng)。
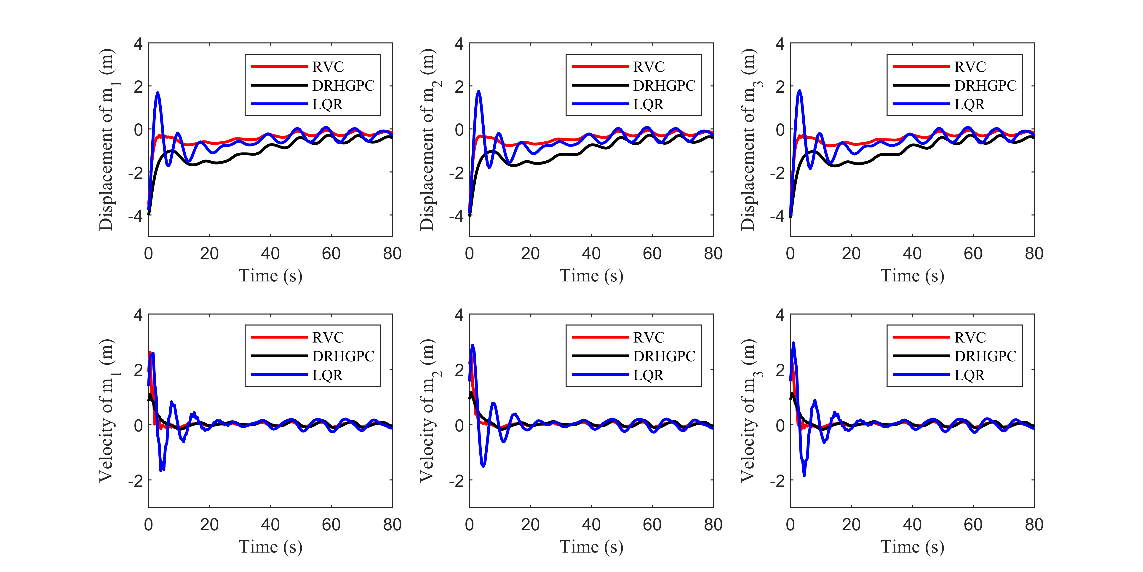
圖1 RVC與DRHGPC、LQR控制下的立管反沖的位移與速度
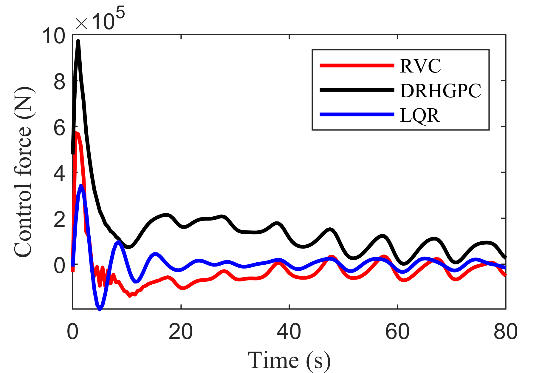
圖2 RVC與DRHGPC、LQR控制下的立管反沖的控制力U
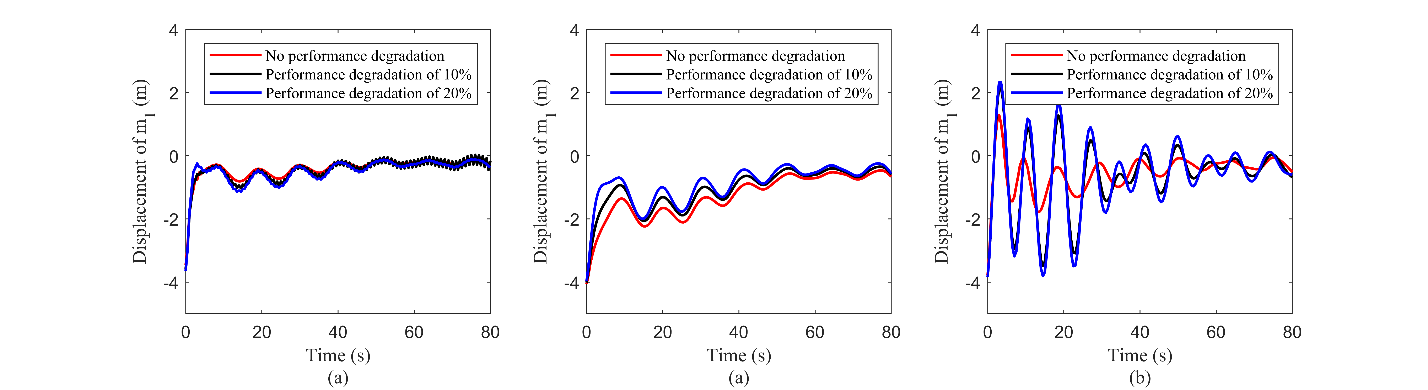
圖3 不同程度參數(shù)不確定情況下質(zhì)量塊一RVC、DRHGPC與LQR控制效果對比
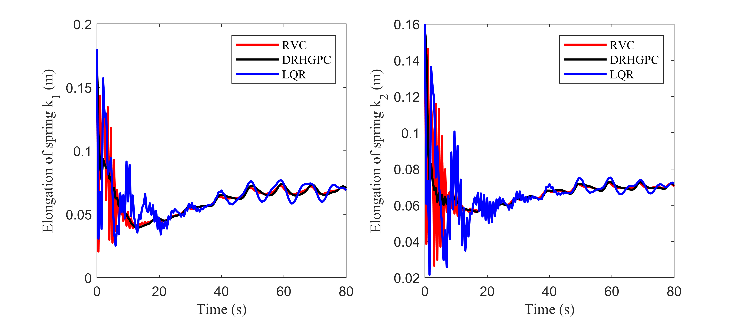
圖4 等效彈簧形變對比
結(jié)論:
本文提出了一種針對深水鉆井隔水立管反沖的魯棒方差控制方法。通過考慮張緊器安裝傾角和參數(shù)誤差導(dǎo)致的模型不確定性,設(shè)計了增量式狀態(tài)空間模型,并通過極點(diǎn)配置與方差約束控制閉環(huán)系統(tǒng)的動態(tài)和穩(wěn)態(tài)性能。仿真結(jié)果表明,該方法能夠顯著改善立管反沖控制的動態(tài)與穩(wěn)態(tài)性能,減少能量消耗,具有較強(qiáng)的魯棒性。該方法不僅能夠有效防止滑動接頭和立管組件的損壞,還能在極端海況下保持良好的控制效果,為深水鉆井隔水立管反沖控制提供了一種有效的解決方案。
通訊作者簡介:
岳元龍,高級工程師。博士,中國石油大學(xué)(北京)人工智能學(xué)院自動化系高級工程師,從事深海油氣水下控制系統(tǒng)關(guān)鍵技術(shù)研究、數(shù)據(jù)融合和嵌入式硬件開發(fā)。
聯(lián)系方式:yueyuanlong232@126.com