
污水處理廠的無模型自適應非奇異快速積分終端滑模控制方法
中文題目:污水處理廠的無模型自適應非奇異快速積分終端滑模控制方法
論文題目:Model-Free Adaptive Nonsingular Fast Integral Terminal Sliding Mode Control for Wastewater Treatment Plants
錄用期刊/會議:Applied Sciences (JCR Q2)
原文DOI:https://doi.org/10.3390/app132413023
原文鏈接:https://www.mdpi.com/2076-3417/13/24/13023
錄用/見刊時間:2023.12.6
作者列表:
1) 徐寶昌 中國石油大學(北京)信息科學與工程學院/人工智能學院 自動化系 教師
2) 王中軍 中國石油大學(北京)信息科學與工程學院/人工智能學院 控制科學與工程專業 碩21
3) 劉忠堯 中國石油大學(北京)信息科學與工程學院/人工智能學院 控制科學與工程專業 碩21
4) 陳貽祺 中國石油大學(北京)信息科學與工程學院/人工智能學院 控制科學與工程專業 博21
5) 王雅欣 中國石油大學(北京)信息科學與工程學院/人工智能學院 控制科學與工程專業 博19
文章簡介:
本文的主要貢獻在于針對污水處理廠難以精確建模以及存在未知干擾等特點,建立了污水處理廠的緊格式動態線性化數據模型,并提出了一種數據驅動的無模型自適應非奇異快速積分終端滑模控制方法。本文方法的優勢如下:
(1)本文所提方法不需要污水處理廠的數學模型,僅需要實時I/O測量數據。因此該方法能有效避免模型的不確定性以及未建模動態對閉環系統的影響。
(2)針對傳統積分滑模控制不能保證系統狀態在有限時間內收斂到零以及跟蹤誤差收斂速度慢的問題,提出了一種新的快速積分終端滑模面,以保證跟蹤誤差在遠離平衡點時能夠快速收斂。
(3)基于國際基準仿真平臺BSM1對所提出方法的控制效果進行了驗證并與PID和MPC等方法的控制效果進行了比較。研究結果表明,本文提出的MFA-NFITSMC方法在污水處理過程的控制中具有更好的跟蹤性能和更強的魯棒性。
污水處理廠(WWTP)由于其復雜的生化特性而難以進行有效控制,并且由于可測變量的局限性,難以建立其精確的數學模型。針對以上問題,本文提出了一種無需數學模型,僅需要輸入/輸出(I/O)數據的無模型自適應非奇異快速積分終端滑模控制(MFA-NFITSMC)算法來實現對污水處理廠的控制。首先,基于動態線性化的概念,建立污水處理廠的緊格式動態線性化(CFDL)數據模型。然后,提出了一個新的快速積分終端滑模面(FITSMS)以加快跟蹤誤差的收斂速度,并結合動態線性化數據模型設計了離散時間無模型自適應非奇異快速積分終端滑模控制器,通過理論分析證明了閉環系統的穩定性。最后,基于國際基準仿真平臺Benchmark Simulation Model No.1(BSM1)進行對比實驗,結果表明,本文方法在污水處理廠的控制上具有更高的跟蹤精度和更強的魯棒性。
隨著經濟快速發展及城市工業化進程的推進,工業污水和生活廢水的排放日益加劇,水污染引起的可用水短缺和日益增長的用水需求,嚴重加劇了水的供需矛盾,已成為全世界面臨的共同難題。污水處理廠是一種廣泛應用于石油化工、居民生活等領域的工業系統,其能夠減少水污染,促進廢水循環利用,大大降低了工業用水需求,避免了環境污染。然而,污水處理廠是一個非常復雜的時變動態系統,其內部的反應過程受到進水流量、污染物負荷以及未知進水組分的影響,呈現出非線性、強耦合和強擾動等特點。因此,針對污水處理廠的控制研究對于改善運行性能、提高出水水質具有重要意義。
(1)基準仿真模型BSM1
為有效評價污水處理控制策略,歐盟科學技術合作組織(COST)和國際水質協會(IWAQ)聯合開發了活性污泥法的基準仿真模型BSM1[24]。該模型包含生化反應池和二沉池兩部分,其總體布局如圖1所示。生化反應池由5個單元組成,前2個單元為缺氧池,主要發生反硝化反應將硝態氮還原為氮氣;后3個單元為好氧池,主要發生硝化反應將氨氮氧化成硝酸鹽。生化反應的機理模型采用IWAQ提出的活性污泥1號模型(activated sludge model No.1,ASM1),該模型包括13種組分,8個生化反應過程及19個參數。經過生化反應池后的污水進入二沉池,二沉池劃分為10層,其主要作用是通過沉淀進行泥水分離,沉淀后上層清水排出,下層污泥一部分被送至生化反應池參與反應,一部分排出系統。二沉池的機理模型采用雙指數沉淀速度模型。
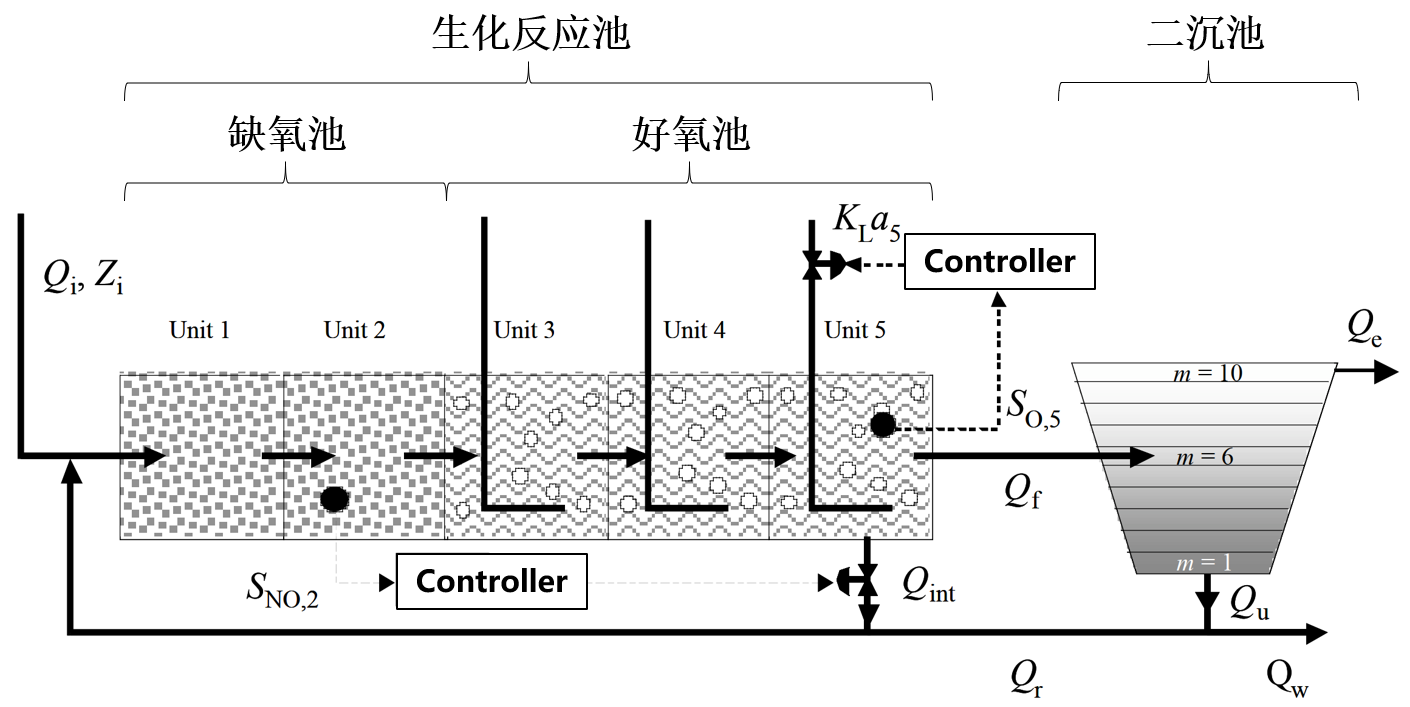
圖1 BSM1工藝流程圖
(2)污水處理廠的動態線性化模型
以溶解氧濃度為例,污水處理廠 控制過程的離散非線性系統可表示為:
![]()
根據引理可得,當![]() 時,一定存在一個被稱為偽偏導數(pseudo partial derivative,PPD)的時變參數
時,一定存在一個被稱為偽偏導數(pseudo partial derivative,PPD)的時變參數![]() ,使系統可轉化為如下CFDL數據模型:
,使系統可轉化為如下CFDL數據模型:
![]()
針對動態線性化數據模型中的未知偽偏導數![]() ,采用改進投影算法進行估計,考慮如下PPD估計準則函數:
,采用改進投影算法進行估計,考慮如下PPD估計準則函數:

上式關于![]() 求極值可得:
求極值可得:
![]()
(3)快速積分終端滑模面
滑模控制的設計分為兩個階段:(1)設計滑模面,迫使系統狀態到達系統的平衡點(2)設計趨近律,保證系統的運動軌跡被驅動到滑模面上并保持。傳統的滑模控制在到達階段無法保證系統的魯棒性,為解決該問題,引入積分滑模控制(ISMC)來消除到達階段,同時,為了保證系統狀態在有限時間內收斂到零并加快收斂速度,本文提出了如下快速積分終端滑模面:
![]()
由于污水處理過程存在進水流量及未知組分濃度的干擾,溶解氧濃度的跟蹤誤差無法一直處于滑模面上,這將導致系統的全局魯棒性惡化。為了滿足跟蹤誤差對滑模面的可達性,同時加快收斂速度和減小抖振,選擇如下趨近律:
![]()
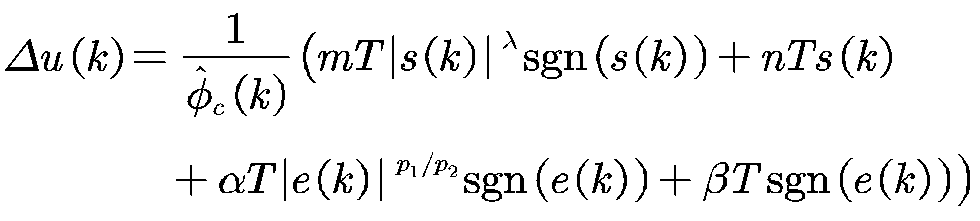
(4)MFA-NFITSMC算法
結合污水處理廠的動態線性化模型和快速積分終端滑模面,可得MFA-NFITSMC控制方法的控制率:
基于MFA-NFITSMC控制方法的污水處理廠控制系統框圖如圖所示:
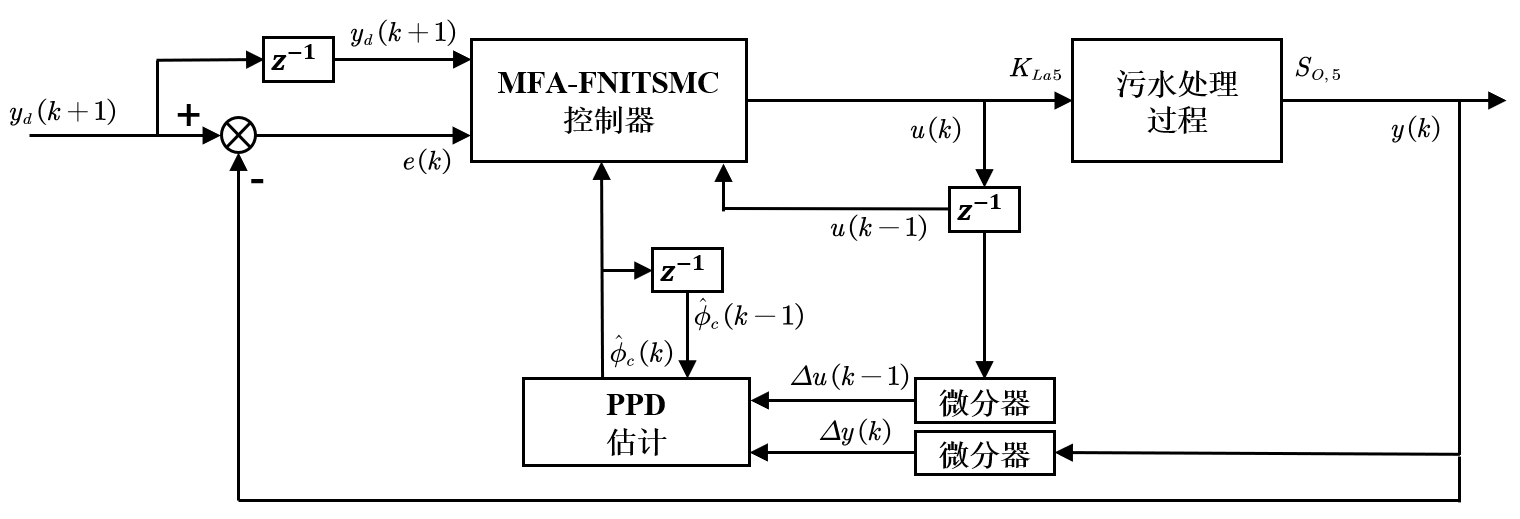
圖2 控制系統框圖
本文的主要貢獻在于針對污水處理廠難以精確建模以及存在未知干擾等特點,建立了污水處理廠的緊格式動態線性化數據模型,并提出了一種數據驅動的無模型自適應非奇異快速積分終端滑模控制方法。本文方法的優勢如下:
(1)本文所提方法不需要污水處理廠的數學模型,僅需要實時I/O測量數據。因此該方法能有效避免模型的不確定性以及未建模動態對閉環系統的影響。
(2)針對傳統積分滑模控制不能保證系統狀態在有限時間內收斂到零以及跟蹤誤差收斂速度慢的問題,提出了一種新的快速積分終端滑模面,以保證跟蹤誤差在遠離平衡點時能夠快速收斂。
(3)基于國際基準仿真平臺BSM1對所提出方法的控制效果進行了驗證并與PID和MPC等方法的控制效果進行了比較。研究結果表明,本文提出的MFA-NFITSMC方法在污水處理過程的控制中具有更好的跟蹤性能和更強的魯棒性。
為驗證所設計方法的控制效果,將MFA-NFITSMC應用于圖1所示的BSM1中。圖3中展示了晴天和雨天第7-14天的動態進水數據和關鍵組分濃度,其中包含進水流量![]() ,易生物降解底物
,易生物降解底物![]() 和氨氮
和氨氮![]() ,采樣間隔為15分鐘,總運行時間為2周,前一周的進水數據用于穩定系統,后一周的動態數據用于測試控制器性能。針對系統控制效果的評價,主要基于以下指標:
,采樣間隔為15分鐘,總運行時間為2周,前一周的進水數據用于穩定系統,后一周的動態數據用于測試控制器性能。針對系統控制效果的評價,主要基于以下指標:

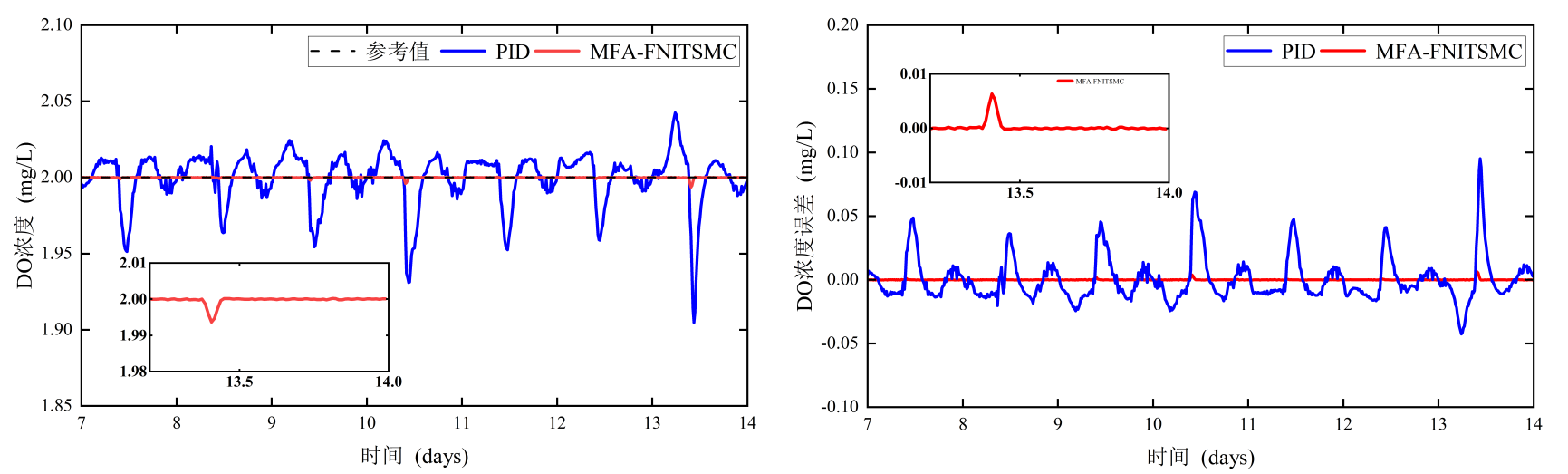
情況1:正常情況下,當第五單元DO濃度保持在![]() 時出水水質達標,因此在該情況下將DO參考軌跡設置為
時出水水質達標,因此在該情況下將DO參考軌跡設置為![]() ,考慮進水流量和組分濃度的外部干擾,分別在晴天和雨天對控制器性能進行測試,并與其他方法進行比較。
,考慮進水流量和組分濃度的外部干擾,分別在晴天和雨天對控制器性能進行測試,并與其他方法進行比較。
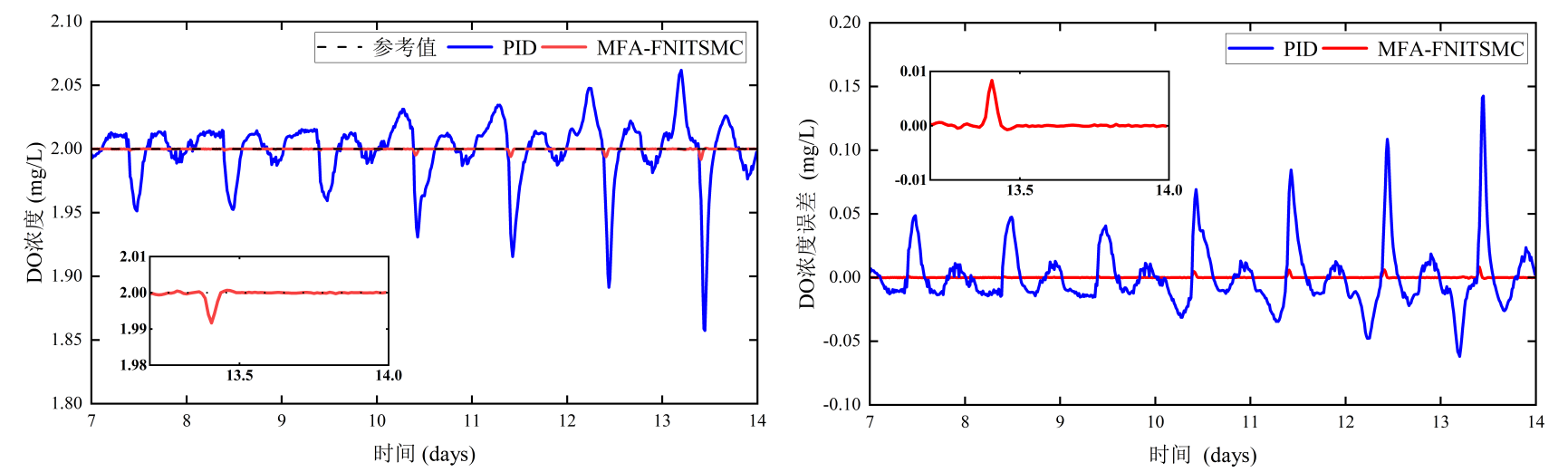
(a) DO濃度 (b) DO跟蹤誤差
圖3 晴天DO控制效果
(a) DO濃度 (b) DO跟蹤誤差
圖4 雨天DO控制效果
表1 情況1中晴天工況不同算法控制性能對比
控制策略 |
ISE |
IAE |
|
MFA-NFITSMC |
0.00014 |
0.0273 |
0.0083 |
OS-ELM |
0.00069* |
0.0475* |
0.0381* |
PI+AT |
0.0009* |
0.0490* |
- |
AFC |
0.0012* |
0.0792* |
0.0198* |
MPC |
0.0026* |
0.0890* |
0.0781* |
BFC |
0.0049* |
0.1507* |
0.0578* |
PID |
0.0078 |
0.1576 |
0.1425 |
表2 情況1中雨天工況不同算法控制性能對比
控制策略 |
ISE |
IAE |
|
MFA-NFITSMC |
0.00012 |
0.0269 |
0.0063 |
OS-ELM |
0.00067* |
0.0375* |
0.0389* |
NNOMC |
0.00053* |
0.0390* |
- |
SR-RBF |
- |
0.0630* |
- |
RBFNNPID |
0.0025* |
0.0947* |
0.0694* |
SORBF-MPC |
- |
0.0810* |
- |
PID |
0.0045 |
0.1239 |
0.0952 |
情況2:采用某實際污水處理廠的進水數據用于測試MFA-NFITSMC,這表明WWTP受到的外部擾動是隨機的而非周期性的。采用三種不同類型的參考軌跡:(1)時不變參考軌跡![]() 。(2)時變參考軌跡,第0天到第1天,
。(2)時變參考軌跡,第0天到第1天,![]() ;第1天到第1.5天,
;第1天到第1.5天,![]() ;第1.5天到第2天,
;第1.5天到第2天,![]() ;第2天到第2.5天,
;第2天到第2.5天,![]() ;第2.5天到第3天,
;第2.5天到第3天,![]() 。(3)采用DO濃度實際參考軌跡。
。(3)采用DO濃度實際參考軌跡。
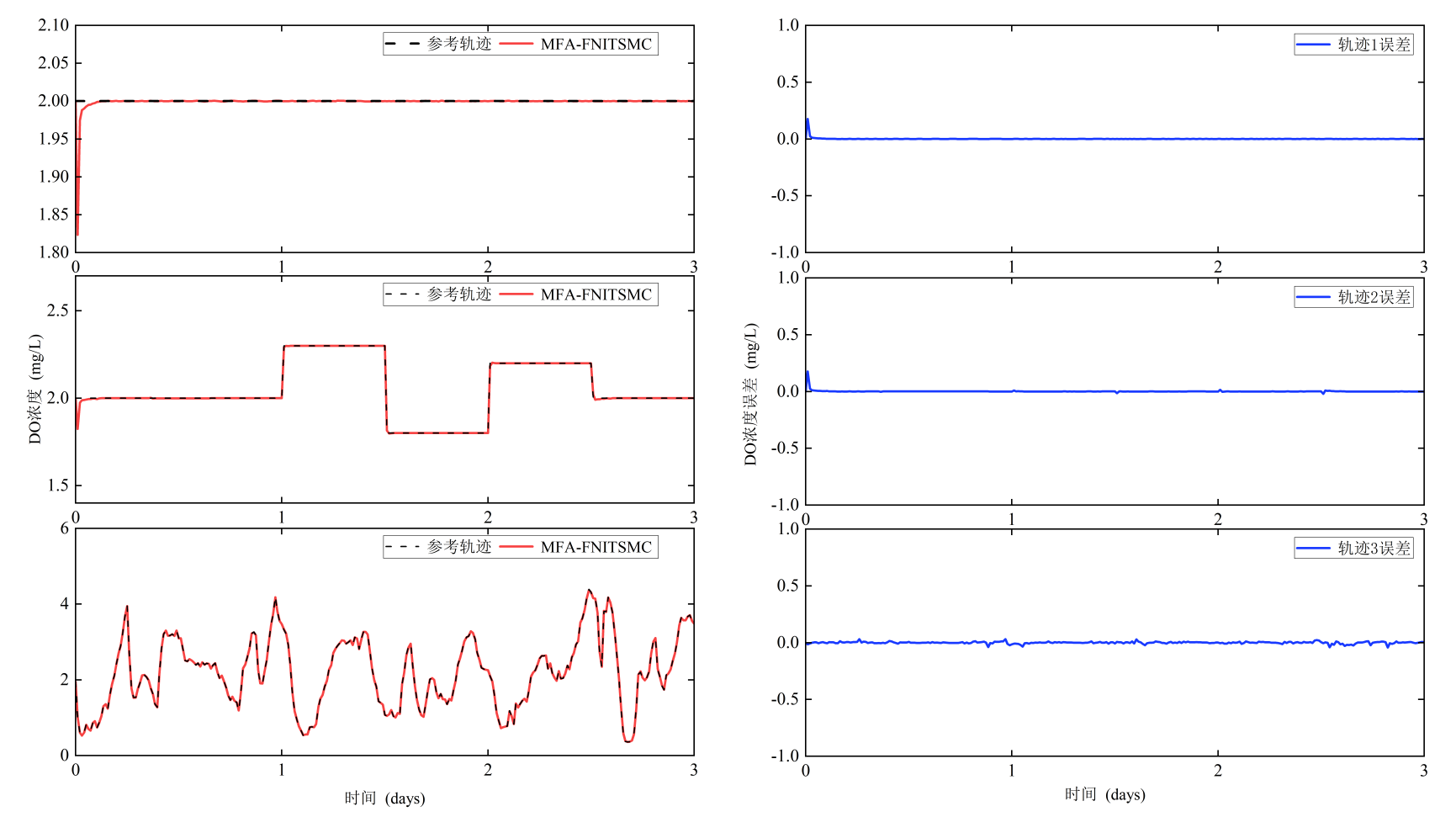
(a) 不同參考軌跡下的DO控制效果 (b)不同參考軌跡下的DO跟蹤誤差
圖5 實際進水數據下的DO跟蹤效果
表3 情況2中使用實際數據下的MFA-NFITSMC控制性能指標
參考軌跡 |
ISE |
IAE |
|
軌跡(1) |
3.3604×10-4 |
0.0031 |
0.1768 |
軌跡(2) |
3.4848×10-4 |
0.0042 |
0.1768 |
軌跡(3) |
2.4345×10-4 |
0.0175 |
0.0438 |
情況3:![]() 和
和![]() 作為污水處理過程的關鍵指標需要控制在合理范圍內,但通過調節內回流量來控制
作為污水處理過程的關鍵指標需要控制在合理范圍內,但通過調節內回流量來控制![]() 時,也會對
時,也會對![]() 造成較大的干擾,傳統方法難以對
造成較大的干擾,傳統方法難以對![]() 和
和![]() 同時進行有效控制。為驗證本文所提方法的控制效果,在雨天工況下采用兩個獨立的MFA-NFITSMC控制器分別控制第二單元硝態氮濃度和第五單元解氧濃度,硝態氮濃度參考軌跡設置為
同時進行有效控制。為驗證本文所提方法的控制效果,在雨天工況下采用兩個獨立的MFA-NFITSMC控制器分別控制第二單元硝態氮濃度和第五單元解氧濃度,硝態氮濃度參考軌跡設置為![]() ,DO參考軌跡設置為
,DO參考軌跡設置為![]() 。
。
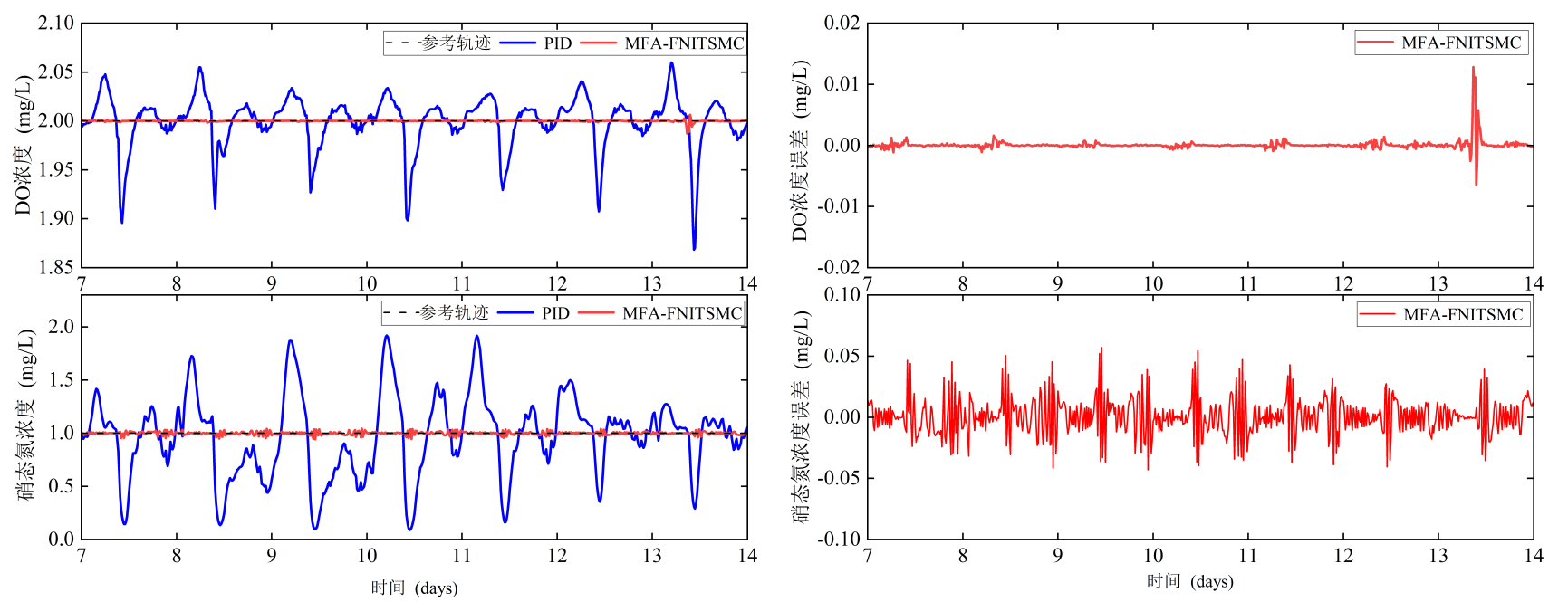
(a) 溶解氧和硝態氮濃度 (b) 溶解氧和硝態氮跟蹤誤差
圖6 雨天溶解氧和硝態氮控制效果
表4 情況3中不同算法控制性能對比
控制策略 |
溶解氧 |
硝態氮 |
||||
ISE |
IAE |
|
ISE |
IAE |
|
|
MFA-NFITSMC |
0.00058 |
0.0013 |
0.0128 |
0.0016 |
0.0782 |
0.0571 |
ASMC |
0.00493* |
0.035* |
0.49* |
0.00527* |
0.046* |
0.42* |
SMC |
0.00552* |
0.030* |
0.61* |
0.00562* |
0.046* |
0.44* |
PID |
0.0143 |
0.072 |
0.74 |
0.0081 |
0.056 |
0.53 |
上述三種情況下的實驗結果表明,本文所提的MFA-NFITSMC控制方法在污水處理廠![]() 和
和![]() 的控制中具有良好的控制效果,與目前已有的控制方法相比,本文方法在ISE、IAE和
的控制中具有良好的控制效果,與目前已有的控制方法相比,本文方法在ISE、IAE和![]() 三個指標中均優于其他方法,其控制精度更高,魯棒性更強,能夠有效抑制WWTP系統中的內部擾動和外部擾動。
三個指標中均優于其他方法,其控制精度更高,魯棒性更強,能夠有效抑制WWTP系統中的內部擾動和外部擾動。
綜上所述,本文所提方法能夠有效控制具有非線性、慢時變和強擾動特性的WWTP系統,與已有的方法相比,MFA-NFITSMC方法具有優越的動態性能和穩態性能,魯棒性更強。
本文針對污水處理過程難以建立精確模型以及存在未知干擾的問題,提出了一種基于數據驅動的無模型自適應非奇異快速積分終端滑模控制方法。所提方法不需要WWTP精確的數學模型及先驗知識,僅需實時I/O數據,其誤差收斂快,控制律非奇異,具有全局魯棒性。此外,通過理論分析證明了系統的誤差收斂性和BIBO穩定性。三種情況下的仿真結果表明,與其他控制方法相比,本文提出的MFA-NFITSMC方法在WWTP系統的控制中具有更高的控制精度以及更強的魯棒性,能夠有效抑制未知干擾對WWTP系統的影響。此外,所提方法為一類非線性慢時變、模型難以建立的多工況復雜系統的跟蹤控制問題提供了一種新的解決思路。
徐寶昌,中國石油大學(北京)信息科學與工程學院/人工智能學院,副教授,博士生導師。現為中國石油學會會員,中國化工學會會員。曾參與多項國家級、省部級科研課題的科研工作,并在國內外核心刊物發表了論文70余篇;其中被SCI、EI、ISTP收錄30余篇。