
立管反沖的離散魯棒H∞/H2最優保性能控制?
中文題目:立管反沖的離散魯棒H∞/H2最優保性能控制
論文題目:Discrete-time robust H∞/H2 optimal guaranteed performance control for riser recoil
錄用期刊/會議:【Ocean Engineering】 (中科院二區)
原文DOI:【https://doi.org/10.1016/j.oceaneng.2024.117699】
錄用/見刊時間:2024年3月27日
作者列表:
1) 岳元龍 中國石油大學(北京)人工智能學院 自動化系教師
2) 孫世龍 中國石油大學(北京)人工智能學院 控制科學與工程專業 碩22級
3) 左 信 中國石油大學(北京)人工智能學院 自動化系教師
摘要:
本文提出了一種新型的離散魯棒H∞/H2最優保性能控制器,旨在解決具有模型不確定性的海洋立管的反沖問題。針對現有質量塊-彈簧-阻尼模型,本文重點考慮了因張緊器機械性能退化和安裝傾角變化導致的控制輸入矩陣參數攝動,由此引入了模型不確定性因素。通過構建離散時間狀態空間模型,設計基于線性矩陣不等式的控制器,以約束立管反沖過程中的速度與加速度的平均值和峰值。仿真結果表明,所提出的控制器在應對立管反沖時表現優于傳統控制方法,尤其在控制輸入發生攝動和復雜海況條件下,展現出卓越的魯棒性。
背景與動機:
深水鉆井立管系統是平臺與海底井口的關鍵連接組件。當海上定位系統故障或遇到惡劣天氣時,需要將海洋立管下部與海底基座分離。在分離瞬間,立管頂部張緊器儲存在立管內部的彈性勢能會迅速釋放,導致立管反沖,嚴重危害生產安全,極易造成經濟損失。目前,許多學者已經將傳統控制方法應用于立管反沖問題,并取得了一定的控制效果。然而,現有的立管反沖模型未能充分考慮張緊器機械性能退化和安裝角度變化引發的控制輸入矩陣參數攝動。為了更貼近實際工況,設計一種能夠有效應對這些不確定性因素并具備卓越性能的控制策略顯得尤為重要。
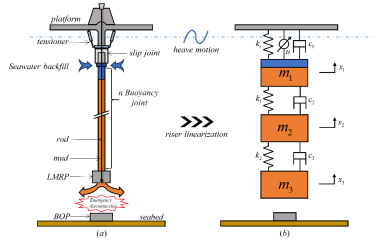
圖1 (a)立管反沖示意圖;(b)立管反沖質量塊-彈簧-阻尼模型
設計與實現:
首先,基于張緊器的機械性能退化和安裝角度變化,考慮了控制輸入矩陣的參數攝動,建立了具有不確定性的增量式離散立管反沖狀態空間模型。

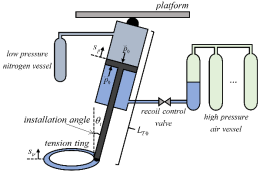
圖2 張緊器示意圖
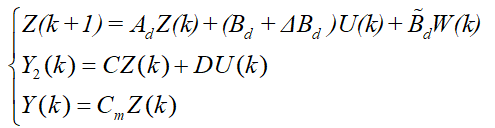
為了約束立管反沖過程中的速度和加速度,本文通過設計狀態權重矩陣Q和輸入權重矩陣R,構建了性能輸出方程Y2(K)。離散化后立管反沖模型的狀態模型為
設計使閉環系統穩定的狀態反饋控制律U滿足如下性能指標
1. 閉環系統是漸進穩定的;
2. H∞性能指標:從W(K)到Y(K)的閉環傳遞函數滿足
![]()
3. H2性能指標:閉環系統性能指標J(K)滿足
![]()
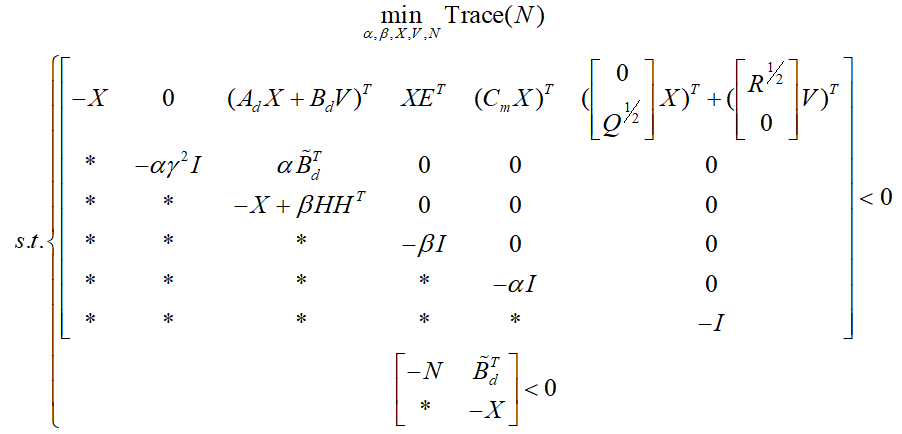
為滿足以上目標,建立如下的線性矩陣不等式求解控制律U
實驗結果及分析:
本文使用南海某鉆井平臺的立管數據進行仿真測試,對比了魯棒H∞/H2控制器(DRHGPC)與LQR控制器在四種不同海況下的性能。實驗結果顯示,所提出的控制器在應對立管反沖時,響應速度快,反沖幅度小,優于傳統的LQR控制器,尤其在控制輸入矩陣發生攝動與極端海況下表現更為優越,有效減少了設備損壞風險。
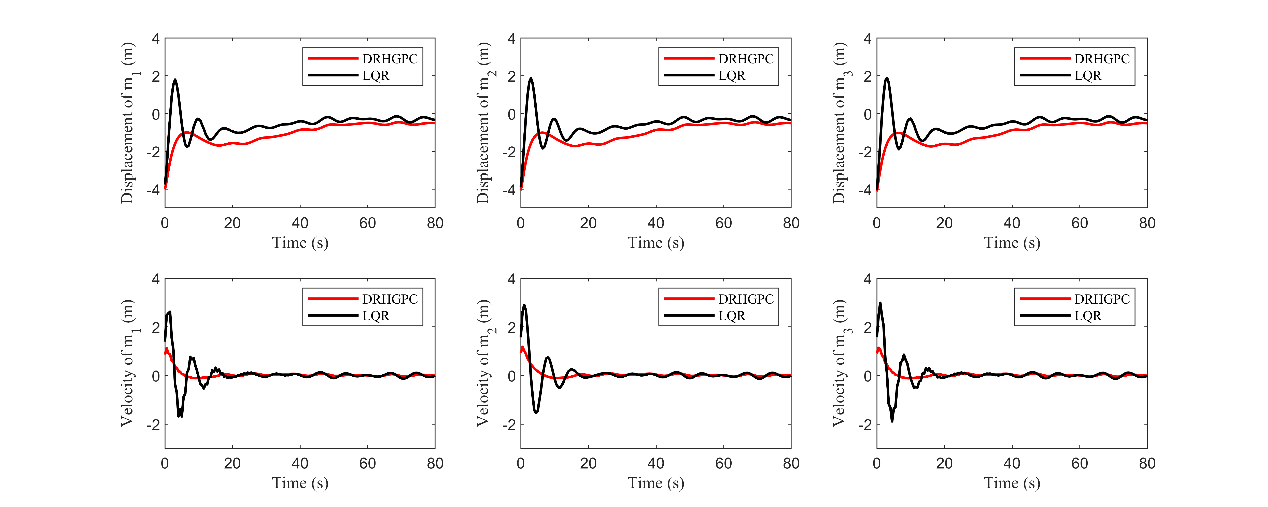
圖3 LQR和DRHGPC控制下的立管反沖的位移與速度

圖4 張緊器不同機械性能時質量塊一DRHGPC和LQR控制效果對比

圖5 等效彈簧形變對比
結論:
本文針對海洋立管反沖控制問題,考慮張緊器安裝傾角變化和性能退化引發的不確定性,建立了新的立管反沖的動態模型。在此基礎上,設計了一種基于H∞/H2理論的魯棒控制器,能夠約束立管反沖過程中位移和速度的最大值及其平均值。通過結合工程現場采集的離散信號與控制信號,利用線性矩陣不等式(LMI)方法求解控制器參數,仿真結果驗證了該控制器在不確定條件下的優越性能,有效提升了系統的穩定性與抗干擾能力。
作者簡介:
岳元龍,高級工程師。博士,中國石油大學(北京)人工智能學院自動化系高級工程師,從事深海油氣水下控制系統關鍵技術研究、數據融合和嵌入式硬件開發。
聯系方式:yueyuanlong232@126.com