
科研動(dòng)態(tài)
對(duì)化工過(guò)程中一類統(tǒng)一非線性特性的建模與仿真
中文題目:對(duì)化工過(guò)程中一類統(tǒng)一非線性特性的建模與仿真
論文題目:Modeling and Simulation of a Class of Unified Nonlinear Characteristics in Chemical Processes
錄用期刊/會(huì)議:The 40th Youth Academic Annual Conference of Chinese Association of Automation (YAC2025) (CAA A類)
錄用/見(jiàn)刊時(shí)間: 2025.3.28
作者列表:
1)萬(wàn)欣玥 中國(guó)石油大學(xué)(北京)人工智能學(xué)院 控制科學(xué)與工程專業(yè) 碩22級(jí)
2)王 珠 中國(guó)石油大學(xué)(北京)人工智能學(xué)院 自動(dòng)化系教師
3)劉佳璇 中國(guó)石油天然氣股份有限公司勘探開(kāi)發(fā)研究院
摘要:
隨著人工智能的快速發(fā)展,神經(jīng)網(wǎng)絡(luò)已成為工業(yè)系統(tǒng)辨識(shí)中的關(guān)鍵工具。靜態(tài)非線性特性如死區(qū)、飽和、負(fù)載和遲滯現(xiàn)象在執(zhí)行器、被控對(duì)象及傳感器中普遍存在,其中傳感器中的遲滯現(xiàn)象尤為顯著。本文探討了利用神經(jīng)網(wǎng)絡(luò)對(duì)靜態(tài)非線性特性進(jìn)行建模與預(yù)測(cè)的方法,重點(diǎn)研究了一種包含死區(qū)、飽和與遲滯等典型非線性特性的靜態(tài)NL模型,評(píng)估了BP神經(jīng)網(wǎng)絡(luò)與RBF神經(jīng)網(wǎng)絡(luò)在靜態(tài)非線性預(yù)測(cè)中的表現(xiàn),并通過(guò)優(yōu)化激活函數(shù)的選擇來(lái)提升模型的泛化能力與預(yù)測(cè)精度。研究結(jié)果為工業(yè)系統(tǒng)中復(fù)雜非線性行為的建模提供了理論依據(jù)與方法參考。
背景與動(dòng)機(jī):
化工過(guò)程具有顯著的時(shí)變性和非線性特征,這些特性源于質(zhì)量守恒、能量守恒與化學(xué)反應(yīng)的共同作用,同時(shí)還受到組件故障和外部隨機(jī)擾動(dòng)等因素的影響。尤其在高溫、高壓以及易燃易爆等危險(xiǎn)環(huán)境下,非線性特性可能導(dǎo)致系統(tǒng)性能下降甚至引發(fā)不穩(wěn)定,嚴(yán)重威脅生產(chǎn)安全。因此,研究化工過(guò)程中非線性特性的成因及其補(bǔ)償方法,不僅對(duì)于提升控制系統(tǒng)的穩(wěn)定性和性能具有重要意義,更是保障工業(yè)生產(chǎn)安全的迫切需求。特別是由于執(zhí)行器故障引起的飽和、死區(qū)和時(shí)滯等非線性問(wèn)題,會(huì)顯著影響控制系統(tǒng)的響應(yīng)和穩(wěn)定性,亟需深入研究并加以解決。
設(shè)計(jì)與實(shí)現(xiàn):
在實(shí)際系統(tǒng)中,多個(gè)非連續(xù)非線性常同時(shí)存在,只有將其統(tǒng)一描述,才能在系統(tǒng)辨識(shí)過(guò)程中降低難度并提高模型準(zhǔn)確性。因此,本研究對(duì)包含多種非線性特性的統(tǒng)一結(jié)構(gòu)進(jìn)行了調(diào)研。S.Rejeb等學(xué)者提出了具有統(tǒng)一非線性特性的模型,如圖1所示。
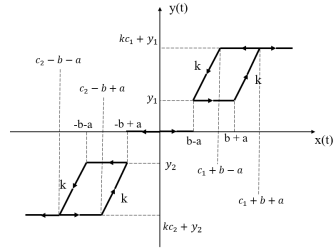
圖1 統(tǒng)一非線性特性
該模型將死區(qū)、飽和、加載和遲滯四種典型非連續(xù)非線性結(jié)合起來(lái),通過(guò)設(shè)置不同的參數(shù)值![]() ,可以抽離出9種不同的非線性組合,該模型的數(shù)學(xué)表達(dá)式如下
,可以抽離出9種不同的非線性組合,該模型的數(shù)學(xué)表達(dá)式如下

該模型構(gòu)建了一個(gè)統(tǒng)一描述死區(qū)、飽和、加載和遲滯等典型非連續(xù)非線性特性的結(jié)構(gòu),通過(guò)調(diào)整參數(shù)組合可實(shí)現(xiàn)多種非線性環(huán)節(jié)的表達(dá),并在系統(tǒng)辨識(shí)領(lǐng)域取得了突破性進(jìn)展。然而,該模型的數(shù)學(xué)表達(dá)式過(guò)于復(fù)雜,非線性特性的組合多樣性及參數(shù)交叉增加了計(jì)算難度。因此,針對(duì)多種非線性特性的系統(tǒng),仍需探索更為合理的系統(tǒng)辨識(shí)方法。
主要內(nèi)容:
本文將遲滯非線性分為上升段和下降段兩種情況進(jìn)行分析。此外,為解決神經(jīng)網(wǎng)絡(luò)無(wú)法描述分叉復(fù)雜曲線的問(wèn)題,提出了帶切換機(jī)制的靜態(tài)神經(jīng)網(wǎng)絡(luò)模型,利用BP和RBF兩個(gè)神經(jīng)網(wǎng)絡(luò)切換機(jī)制來(lái)描述覆蓋整個(gè)數(shù)據(jù)范圍的曲線,避免了單一網(wǎng)絡(luò)無(wú)法擬合分叉曲線的局限。對(duì)靜態(tài)統(tǒng)一非線性中包含遲滯環(huán)的情況建立了如下模型:

圖2 包含遲滯的靜態(tài)統(tǒng)一非線性特性的仿真模型
其中,y(t-1)為前一時(shí)刻的輸入信號(hào);y(t)為當(dāng)前時(shí)刻的輸入信號(hào);h(t)為符號(hào)函數(shù),其表達(dá)式為
A-NN為上升段神經(jīng)網(wǎng)絡(luò)模型;B-NN為下降段神經(jīng)網(wǎng)絡(luò)模型; 為上升段神經(jīng)網(wǎng)絡(luò)輸出的預(yù)測(cè)值;
為上升段神經(jīng)網(wǎng)絡(luò)輸出的預(yù)測(cè)值; 為下降段神經(jīng)網(wǎng)絡(luò)輸出的預(yù)測(cè)值。如圖2所示的網(wǎng)絡(luò)模型中,包含兩個(gè)神經(jīng)網(wǎng)絡(luò)模型,由于遲滯非線性的存在,輸出不僅由當(dāng)前時(shí)刻輸入決定,還取決于前一時(shí)刻的輸入,因此信號(hào)在進(jìn)入神經(jīng)網(wǎng)絡(luò)前,首先要與前一時(shí)刻的輸入信號(hào)進(jìn)行數(shù)值上的比較。若當(dāng)前時(shí)刻的輸入大于前一時(shí)刻的輸入,則符號(hào)函數(shù)輸出1,閉合A-NN輸入通道的開(kāi)關(guān),將當(dāng)前時(shí)刻的輸入信號(hào)送入上升段神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練;反之,則符號(hào)函數(shù)輸出0,閉合B-NN輸入通道的開(kāi)關(guān),將當(dāng)前時(shí)刻的輸入信號(hào)送入下降段神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練。
為下降段神經(jīng)網(wǎng)絡(luò)輸出的預(yù)測(cè)值。如圖2所示的網(wǎng)絡(luò)模型中,包含兩個(gè)神經(jīng)網(wǎng)絡(luò)模型,由于遲滯非線性的存在,輸出不僅由當(dāng)前時(shí)刻輸入決定,還取決于前一時(shí)刻的輸入,因此信號(hào)在進(jìn)入神經(jīng)網(wǎng)絡(luò)前,首先要與前一時(shí)刻的輸入信號(hào)進(jìn)行數(shù)值上的比較。若當(dāng)前時(shí)刻的輸入大于前一時(shí)刻的輸入,則符號(hào)函數(shù)輸出1,閉合A-NN輸入通道的開(kāi)關(guān),將當(dāng)前時(shí)刻的輸入信號(hào)送入上升段神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練;反之,則符號(hào)函數(shù)輸出0,閉合B-NN輸入通道的開(kāi)關(guān),將當(dāng)前時(shí)刻的輸入信號(hào)送入下降段神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練。
實(shí)驗(yàn)結(jié)果及分析:
本文基于神經(jīng)網(wǎng)絡(luò)對(duì)由死區(qū)、飽和、加載、遲滯等典型非線性組成的NL模型進(jìn)行了研究,驗(yàn)證結(jié)果如圖3所示,BP神經(jīng)網(wǎng)絡(luò)能夠?qū)L模型進(jìn)行較好的預(yù)測(cè),實(shí)際輸出曲線能夠?qū)ζ谕妮敵銮€進(jìn)行較高程度的擬合,但在NL模型的拐點(diǎn)處,預(yù)測(cè)值和實(shí)際值仍存在誤差,網(wǎng)絡(luò)無(wú)法對(duì)拐點(diǎn)進(jìn)行很好的預(yù)測(cè)。
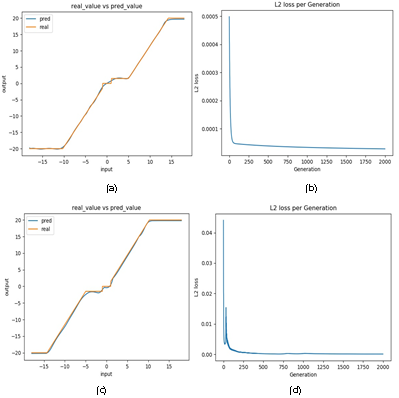
圖3 基于NL模型的BP神經(jīng)網(wǎng)絡(luò)的訓(xùn)練結(jié)果
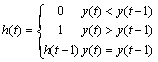
如圖4所示,RBF神經(jīng)網(wǎng)絡(luò)對(duì)NL模型具有很好的預(yù)測(cè)結(jié)果,實(shí)際輸出曲線與期望輸出曲線的擬合程度高,對(duì)NL模型的拐點(diǎn)也能做到很好的逼近。
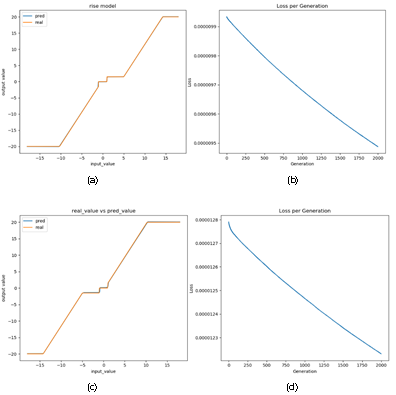
圖4 基于NL模型的RBF神經(jīng)網(wǎng)絡(luò)的訓(xùn)練結(jié)果
結(jié)論:
本文研究了化工過(guò)程中靜態(tài)統(tǒng)一非線性特性的建模與仿真,采用BP神經(jīng)網(wǎng)絡(luò)和RBF神經(jīng)網(wǎng)絡(luò)對(duì)死區(qū)、飽和、負(fù)載和遲滯等非線性組合特性進(jìn)行訓(xùn)練與預(yù)測(cè)。通過(guò)選擇合適的激活函數(shù),優(yōu)化了兩種神經(jīng)網(wǎng)絡(luò)模型的訓(xùn)練性能和預(yù)測(cè)精度。實(shí)驗(yàn)結(jié)果表明,雖然RBF在預(yù)測(cè)精度和拐點(diǎn)擬合方面優(yōu)于BP,但BP由于具備較強(qiáng)的全局學(xué)習(xí)能力,更適合捕捉動(dòng)態(tài)非線性變化。相比之下,RBF結(jié)構(gòu)更簡(jiǎn)單、訓(xùn)練速度更快,在計(jì)算資源受限的情況下具有更高的效率。未來(lái)的研究將進(jìn)一步探索基于真實(shí)工業(yè)數(shù)據(jù)的建模方法,并引入RNN和LSTM等時(shí)序神經(jīng)網(wǎng)絡(luò),以提升模型的適應(yīng)性與預(yù)測(cè)精度。
作者簡(jiǎn)介:
王珠,男,博士,中共黨員,現(xiàn)任中國(guó)石油大學(xué)(北京)副教授、碩士生導(dǎo)師。2016年至今在中國(guó)石油大學(xué)(北京)自動(dòng)化系工作,現(xiàn)任中國(guó)自動(dòng)化學(xué)會(huì)人工智能技術(shù)與工業(yè)應(yīng)用專業(yè)委員會(huì)委員、中國(guó)化工學(xué)會(huì)信息技術(shù)應(yīng)用專業(yè)委員會(huì)青年委員、北京人工智能學(xué)會(huì)理事。
在科研與社會(huì)服務(wù)方面,研究興趣為系統(tǒng)辨識(shí)與智能控制、煉化過(guò)程動(dòng)態(tài)異常診斷與故障預(yù)警、大數(shù)據(jù)質(zhì)量預(yù)測(cè)與綜合優(yōu)化。近年來(lái),主持重點(diǎn)流程工業(yè)企業(yè)的高級(jí)智能報(bào)警項(xiàng)目數(shù)項(xiàng)以及國(guó)家自然科學(xué)基金項(xiàng)目,已發(fā)表高水平學(xué)術(shù)論文30余篇。